VFX小布丁
@VFX小布丁
6天, 7小时 前在线-

-

步骤13——
计算镜头畸变
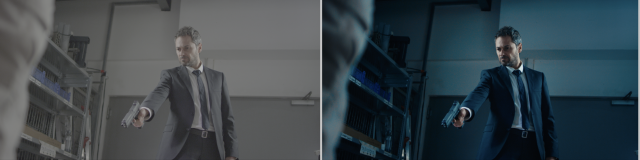
默认情况下,我们添加到3D场景中的任何CG元素都是没有镜头畸变的。因此,当我们将CG元素与2D素材合成时,会发现它们不匹配,看上去不像是同一个相机拍摄的。这种情况下,我们需要解决镜头畸变问题:
使用CameraTracker计算2D素材的镜头畸变,并生成一个LensDistortion节点,用这个节点对CG素材应用相同的镜头畸变。
使用CameraTracker计算2D素材的镜头畸变,并生成一个LensDistortion节点,用这个节点校正2D素材的镜头畸变以匹配CG元素。
直接使用CameraTracker计算并校正2D素材的镜头畸变,以匹配CG元素。
- 注意:上面提出的这三种方案的前提都是假设解算前将LensDistortion设置为Unkno…
-
步骤12——
在场景中放置物体
我们可以使用摄像机和点云将几何体添加到场景中。 我们也可以手动添加物体,但将它们放置在摄像机视野内所需的位置上可能会比较耗时。 CameraTracker为我们提供了自动创建功能,帮助我们实现想要的结果。
1. 在2D视图中,选择平面上的点放置几何体,比如将卡片放在垂直或水平面上。
小提示:使用2D视窗和3D点云划像有助于定位潜在点。
2. 框选需要的点,或按住Shift点击单独的点。
3. 在2D视窗中右键选中的点,然后选择Create菜单显示可用的几何体。
4. 使用所有选中点的平均位置将几何体放置在场景中。
下图显示的是使用垂直和水平面上的点在场景中放置了两张卡片。

-
步骤11——
合并解算
有时候,我们可能会有来自同一场景或内容的多个源素材,比如我们可能有来自辅助摄像机的素材,或其他人拍摄的场景的细节静帧。Camera Tracker提供了一种方法,可以解算每个源素材,并将它们合并到同一个世界坐标中。这样我们就可以利用来自辅助源的高质量摄像机跟踪点(这些跟踪点可能更好解算),然后将这些跟踪点用于其他难以解算的源中。我们还可以使用这种技术将特写静帧与广角镜头关联起来。
这种方法的关…[查看更多]
-
四、创建卡片
CameraTracker 可以自动为每个解算帧创建一个 3D 卡片,这些卡片上会有摄像机投影的画面帧。
1. 从 Export 下拉菜单中选择 Cards。
2. 启用或禁用 Link output 参数,以确定 Camera 节点是表达式链接还是烘焙:
- 启用时,CameraTracker 会创建表达式链接的摄像机组,这样属性面板的 Output > Camera 参数有更改时就会更新新创建的摄像机。
- 禁用时,上述参数的任何调节都不会影响到新创建的摄像机。
3. 点击 Create。
如果要处理大量的帧,会弹出确认对话框。
4. 点击 Yes 继续,或点击 No 取消导出。
CameraTracker 将添加一个 Group 节点到节点…[查看更多]
-
三、创建点云
CameraTracker 可以创建烘焙的点云,当我们更改 CameraTracker 属性面板参数时这个点云不会更新。
1. 从 Export 下拉菜单中选择 Point cloud。
2. 点击 Create。
CameraTracker 会在节点图中添加一个 CameraTrackerPointCloud 节点。
3. 双击 CameraTrackerPointCloud 节点打开属性面板。
4. 使用显示和渲染下拉菜单设置点在视窗和渲染时的显示方式:
- off – 隐藏 3D 点。
- wireframe – 仅显示点。
- solid -…
-
二、创建场景
CameraTracker 可以创建一个随时可用的 3D 场景,其中包含来自跟踪和解算数据的点云、摄像机和 Scene 节点。Scene+ 选项比标准的 Scene 要多一个 LensDistortion 和 ScanlineRender 节点。
1. 从 Export 下拉菜单中选择 Scene。
2. 启用或禁用 Link output 参数,以确定场景的 Camera 节点是表达式链接还是烘焙:
- 启用时,CameraTracker 会创建一个表达式链接的摄像机,这样属性面板的 Output > Camera 参数有更改时就会更新该摄像机。
- 禁用时,上述参数的任何调节都不会影响到新创建的摄像机。
-
步骤10——
使用解算数据
调节完场景后,我们就可以使用解算数据创建摄像机、多机位脚架、3D 场景和点云、镜头畸变,或基于摄像机数据创建卡片。
——————
一、创建 Camera 节点
CameraTracker 可以使用跟踪和解算数据创建链接🔗或烘焙的摄像机,模拟原始摄像机轨迹。我们可以根据需要创建单个摄像机,也可以创建摄像机组。
1. 从 Export 下拉菜单中选择 Camera。
2. 启用或禁用 Link output 参数,以确定 Cam…[查看更多]
-
-
三、使用提取的跟踪数据更新解算结果
在 CameraTracker 中,我们可以使用跟新的跟踪数据向已有摄像机添加更多帧。不过一般情况下,帧范围不能扩展很远,通常情况下扩展范围为 10~15%,因为已有的解算会将 3D 点锁定到固定位置,所以将新的 2D 跟踪数据匹配到 3D 点上会产生很高的跟踪误差,而 CameraTracker 会拒绝这些误差。
比如说,我们已经解算了第 1~10 帧,那么现有的 3D 跟踪点都是基于这些帧的数据得来的。如果我们将这个解算路径扩展到第20帧,使第 11~20 帧上的 2D 点匹配已计算的 3D 点,一般不会得到好的匹配,而且扩展范围的解算误差会增加。
要使用更新的跟踪数据来更新解算结果:
1. 跟踪其他帧。
如果被拒绝的跟踪点(红色高亮显示)…[查看更多]
-
二、排除解算故障
CameraTracker 中有一些排障工作流程,可以用来提高解算精度。不过这里十七还是要提醒大家,良好的解算结果还是取决于良好的跟踪数据。
——————
使用曲线阈值删除跟踪点
我们可以使用 AutoTracks 选项卡的阈值参数动态拒绝跟踪点,并移除它们,以提高精度。下面以 error – rms(均方根误差)给大家讲解下。
1. 点击属性面板的 AutoTracks 选项卡,并选中 error – rms 曲线。
小提示:我们可以按F键,将选中的曲线最大化地展示在坐标图中。
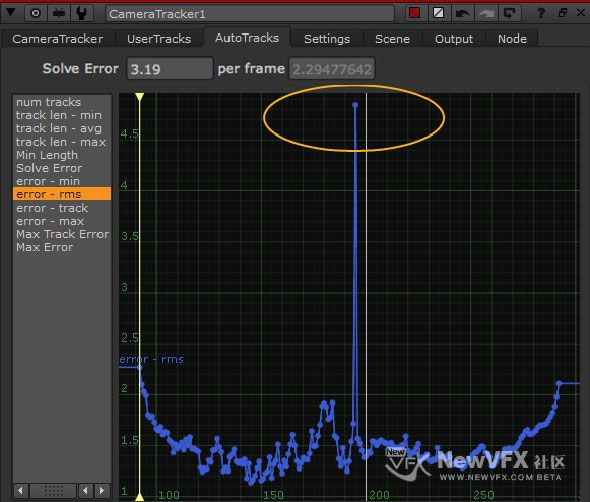
如上图所示,我们可以看到在第195帧附近,误差曲线有一个明显的上跳。
2. 将视窗播放头移动到受影响的区域,并检查视窗中已跟踪的特征点。
3. 降低属性面板中的…[查看更多]
-
详细操作在这里,不了解的V友可以参考下面这个帖子:
-
预览运动匹配质量
解算完成后,我们可以通过预览添加到 3D 场景中的对象来查看解算质量。
【方法一】
1. 在 2D 视窗中,右键一个跟踪点(或选中几个理想情况下在同一平面上的跟踪点),然后选择 create > cube。
CameraTracker 将创建一个 Cube 节点,并将它放置在选中点的平均位置上。我们可以使用这个立方体测试它与输入素材的匹配程度。
小提示:我们可以使用 Cube 属性面板的 uniform scale 参数调节立方体的大小。
2. 在 CameraTracker 属性面板上,将 Export 菜单设置…[查看更多]
-

不好意思,之前链接失效了,刚刚修复好了,可以正常下载啦~~感谢提醒~~
-

VFX木木 在 NewVFX 的 美食广告log灰片调色素材 中发了评论 7年, 3个月 前
谢谢
-
请教个问题呀,大神,用deadline渲染的时候开机的时候不输入用户名和密码 可以实现渲染任务吗?我试了一下 没反应,能否指点迷津
-
检查解算的 User Tracks
我们可以在 UserTracks 选项卡中的 User Track 表中检查已解算的 User Track 的误差。如果误差很高,我们可以检查一下 2D 特征点轨迹的 x、y。或者,我们也可以取消勾选 User Track 的 e(enable,即启用)列,将其从场景中移除,然后点击 Solve 再次解算。
User Track 的 3D 位置(x,y,z)也会显示在列表中,就像 3D 视图一样。
小提示:在解算摄像机后,我们可以创建 User Track,在镜头中提取特定的 3D 位置。为了产生精确的 3D 点,User Track 必须定义在具有良好视差的3帧或更多帧里。我们创建 User Track 后,需要在 User Track 列表中选…
-
检查自动跟踪曲线
CameraTracker 属性面板 Auto Tracks 选项卡的曲线向我们展示了更多详细的解算信息,我们可以同时选择所有曲线,也可以选择单根曲线(如 error – rms,即 root mean square,均方根误差)查看更详细信息。
这里十七和大家解释下什么是均方根误差。均方根值是将所有值平方求和,求其均值,再开平方所得到的值。均方根误差是用来衡量观测值同真值之间的偏差的。在 error – rms 曲线中,真值即跟踪点的位置,观测值即解算后重新映射的点的位置。
小提示:我们可以按F键,将选中的曲线最大化地展示在坐标图中。

选中所有解算曲线
 [查看更多]
[查看更多] -
一、查看解算数据
我们可以使用 Settings 选项卡的 Display 参数,控制解算数据在视窗中的显示:
- Show tracks – 显示或隐藏2D跟踪信息。
- Show projected 3D points – 显示或隐藏3D点的2D位置。
- Show key tracks only – 只显示最长的跟踪点,这些跟踪点是用于计算解算结果的。
- Show 3D marker – 在3D视窗中显示或隐藏每个点的3D标记。
在2D跟踪点上会使用交通灯颜色标记,以便在 AutoTracks 选项卡中找到合适的跟踪点拒绝阈值,默认为琥珀色(介于黄色和咖色之间的一系列淡黄与棕色),绿色表示良好的跟踪点,红色表示较差的跟踪点。
圆圈和十字架是解算过的自动跟踪…[查看更多]
- 查看更多