韩十七
@韩十七
5小时, 10 分钟 前在线-

-
我的机子上都是同时有 Nuke9 Nuke 10 Nuke11 Nuke 12,最近刚刚增加了Nuke13版本,都能正常使用。在Win10原装系统、Mac10.13 、14.6、Centos8.2下都正常。
-
 起先我怀疑是不是插件导致的,后来我清除了环境变量和插件,重新安装破解,打开后还是一样,版本12.2v2,系统win10….
起先我怀疑是不是插件导致的,后来我清除了环境变量和插件,重新安装破解,打开后还是一样,版本12.2v2,系统win10….-
 这种情况,貌似前几年遇到过,你可以新安装后,直接打开,如果能正常弹出注册界面就表明电脑本身没有问题。大多可能是和谐步骤中,Rlm可能缺少权限或者lic的问题~~,可以先不HX,直接启动测试下
这种情况,貌似前几年遇到过,你可以新安装后,直接打开,如果能正常弹出注册界面就表明电脑本身没有问题。大多可能是和谐步骤中,Rlm可能缺少权限或者lic的问题~~,可以先不HX,直接启动测试下-
没hx之前可以,能弹出注册框,hx过后就主界面闪一下白屏退出了,我用的是一键安装破解版,没有flt,之前能用,就最近才用不了的,后不会是hx程序(Crack)出问题了,我继续研究一下
-
-
-
-
韩十七 发布了新的动态评论 4年, 11个月 前
感谢支持,加油⛽️
-
韩十七 发布了新的动态评论 4年, 11个月 前
欢迎,加入NewVFX学习队 哈哈
-
可以加呀,keylight本身可以处理,当然也可以在keylight之后使用任何的Nuke节点来进行边缘处理,边缘与背景的反光处理等,都是可以做的,Nuke的最大特点就是灵活,自定义流程。
-
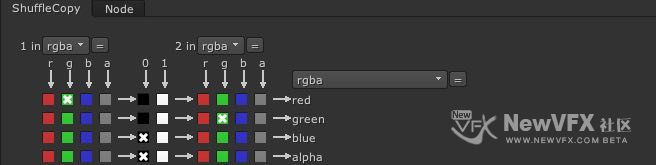
韩十七 在版块 Nuke合成影视制作 中回复了话题 【Nuke合成】玻璃破碎与实拍场景视频的交互【图文教程】 5年, 8个月 前
Shuffle Copy的通道交换细节已经补充到流程里面啦,动手练习,加油⛽️
-
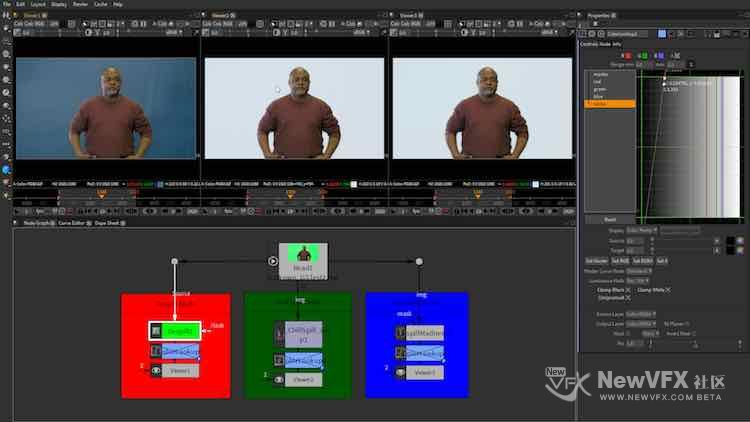
韩十七 在版块 Nuke合成影视制作 中回复了话题 【Nuke抠像】使用ChromaKeyer色度键控进行蓝屏绿屏抠像 5年, 8个月 前
直接串行连接,在下方顺序添加着走~~,比较简单,针对不复杂得素材有效。再复杂一点点得素材,推荐社区内使用并行连接方式分别提取不同区域遮罩,最后进行合成得过程。
-
Rainmaker […]

-
制造和使用光效是Nuke臭名昭着的痛点。 有一些工具可以填补这个空白,就像Andrew Kramer的新型Nuke版本的Optical Flares工具一样。 但它真的很贵,而且这让工作室艺术家望而却步。 如果场景是在户外拍摄的,如果你的导演想要一个镜头光晕,那么你需要自己制作!这是多么痛苦的一件事情。
而FlareFacto […]

-
Nice 看它能否与AK的比一比
-
与AK的还是有很大差距的,主要在于UI界面上,另外最近社区内也刚刚发布一款速度效率更快的FlareStar,可以试试
-
-
提取码是什么啊
-

点击下载,在弹出框中下方就是提取码
-
没看懂怎么装呀
-
安装Nuke的Gzimo插件,可以点击页面中的安装教程,学习Gzimo的安装菜单写法,还是比较容易的。如果有更多的插件需要手工安装,会耗费许多时间,这种情况下,可以使用社区内的自动化安装插件安装。
-
-
-
-
-
DespillMadness v3.0 在Nuke 开源插件中排名第一的去除溢色插件,大名鼎鼎,全球近两万多名 Nuke 合成师在使用此插件。
具有微调选项和溢出遮罩导出的Despill算法集合。
提示:DespillMadne […]
-
谢谢分享!
-
谢谢大佬分享
-
-
散景模糊模拟逼真的镜头模糊。当需要模拟非常“失焦”的背景时,它尤其有用。尤其是难以使用Zdepth传递(或Ramp)来模拟景深的时候。
散景模糊测试
用于变形镜头的“Bokeh Aspect”滑块:
最新的图形界面,更加方便操作:
Nuke Gzimo的安装方法详解:

-
Z瑞 和
韩十七 已经成为好友 5年, 10个月 前 -

LinMo 和
韩十七 已经成为好友 5年, 10个月 前 -
一套在国际上排名第一的Nuke工具,提供dslr原始读数,CC工具,HDR合并,刚体物理,基于ICC的颜色变换,支持读取RAW。
J_Ops包括:
J_3Way :符合ASC CDL标准的GPU加速3路色彩校正工具,具有直观的查看器控制系统。
J_GeoManager:一个3D故障排除工具,显示三维场景的信息,并提供剥离对象,属性,材料和变换的功能。
J_GotSomeI […]

-
请问有nuke10.5导入cr2的插件吗?
-
这个目前没有找到
-
-
-
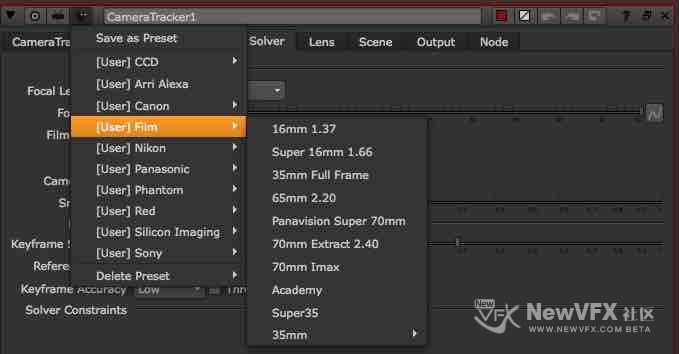
这个插件为许多最常见的胶卷和数码相机光圈和光圈值实现了预设胶片Fiml back,使用的时候,只需要点选即可。
安装方法:
1.将文件复制到.nuke文件夹或NUKE_PATH中 […]
-
韩十七 在版块 Nuke合成影视制作 中回复了话题 【色彩理论】色彩中的Bit(比特)与色彩深度、HDR 5年, 11个月 前
楼上正解,是干货,非常棒。在此进一步延伸并做补充:(Nuke,达芬奇默认使用32位浮点计算,且Nuke仅支持32位运算)
许多人曾问我,输出视频、音频的时候,选择什么格式好呢?为什么?
有些作品直接往网上传的建议输出成JPG或者PNG,而需要交给下一个环节处理的,我们仅仅输出LUT或者XML交换文件,或者直接就是工程交互(费劲心思)。那同事们就问,为什么呢?为什么昨天还说需要JPG序列,今天就变成了需要DPX序列,而前天还在需要ApplePress,此刻又需要嵌套工程文件了。
正如这篇文章里所说的编码的问题,在计算机领域永远存在一个问题:精度与容量的矛盾,计算能力与计算时间的矛盾,且这个冲突会一直延续下去,永远是在这两个问题之间寻找平衡,由不同的用途也就出现了不同的格式。
-
第四步、在ramp1、Ramp2节点上输入表达式,使其自动跟随输入视频尺寸,X轴的数值=输入视频的宽度(Width);Y轴的数值=输入视频的高度(Height)。
在X、Y轴分别输入表达式(可以直接复制):
Stmap_format.width
curves

同上,在第二个ramp输入表达式(继续复制):
curves
Stmap_format.height到此,大功告成啦,随意更改输入端的尺寸,整个节点都会跟随变化,并生成正确尺寸的ST-Map啦~~啧啧,很神奇😄
好啦,今天十七的教程就到这里啦,大家可以尝试一下,按教程的思路做出其他节点之间的交互效果,在此也算抛砖引玉 😄。
如有疑问,可以跟帖留言会尽快回复噢。点击十七的头像可以查看更多精…[查看更多]
-
第三步、将两个Ramp连接起来,我们就得到ST-Map啦,R通道渐变与G通道渐变后交融的结果:(每一个颜色像素代表一个坐标:X,Y)

红色与绿色交融会产生了二次色(什么是二次色呢?请戳👇这里):黄色,看起来非常的漂亮,啧啧,实际上这个图片里对应分布存储的是4K大小的文件的坐标信息。
假设这时候,我们连接输入的视频大小变成2k,我们手动更改两个Ramp中的参数为当前视频的宽高即可。
那有没有自动化的方法呢?不管输入的视频尺寸是多大,都会自动跟随当前输入视频的大小自动更改?
答案当然是肯定的,接下来我们开始让其变得“智能化”一些:
-
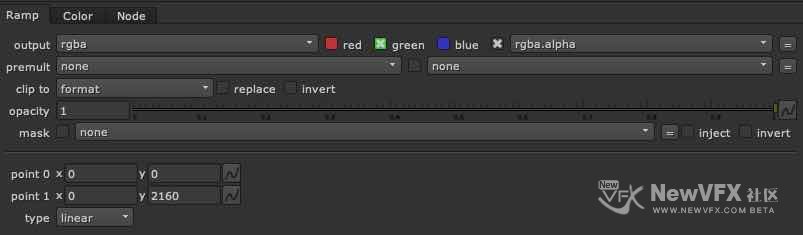
第二步、在Constant节点上继续添加一个Ramp(渐变)节点,使用G(绿色)通道来存储Y轴的坐标信息,Ramp节点设置如下:
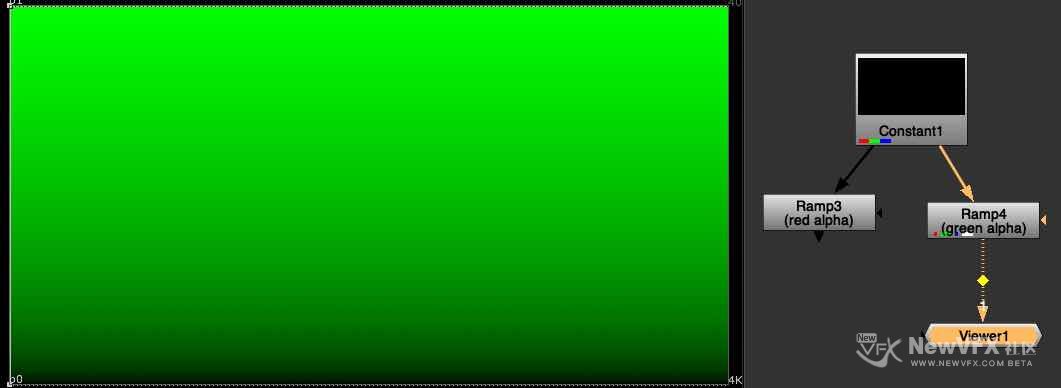
G通道的Ramp节点设置:
-
第一步、在Nuke中新建Constant节点,并在下方添加一个Ramp节点用于记录X轴信息,节点图如下:

在Ramp中,我们使用R通道来存储X轴的坐标信息,则在Ramp节点上的设置参数如下:(若还步明白,继续补习楼上原理😄)

- 查看更多
