VFX小布丁
@VFX小布丁
3天, 4小时 前在线-

3DEqualizer […]
-

做得灰常棒棒,色彩浓度控制的比较合适,很写实~~,进一步深化得话,可以在这个流程上通过更改某些节点得参数来形成自有风格:
1、第一步临摹,要尽可能得细致,学习流程。
2、在掌握流程后,找到自己更敏感得色系,更喜欢得色彩风格~~,哈哈,反正追光大大一直这么强调,个人感觉这个学习方法还是非常有用得。
-
您好,今天有空才回复您,在相对定焦镜头的情况下,每只镜头的畸变相对是固定的。所以,你只需要拍摄一张棋盘格进行矫正,或者使用特征明显的单帧图片进行矫正即可。
ST-Map生成序列帧的意义在于矫正动态畸变,在每一帧的畸变参数都发生变化的情况下使用。
-
-
非常感谢肯定~~近期做了许多调整,调整好后就能上传原始工程文件了~~到时候再把下载权限调整一下。
-
-
上传图片后,直接插入即可,不要用相册~~,相册适合多张图片,一张图片直接上传后插入就可以啦~~
-
 作业
作业 -
实际上作为剪辑师,主流的剪辑软件都应该会操作,以适应各种不同的剪辑环境。剪辑软设计之初本就有许多不同之处,随着硬件的发展,软件瓶颈也会随之变得很小更加易于操作,各软件之间的差距也逐渐缩小。从专业剪辑的角度来说,avid市场占有率也不会一家独大,但传统的优势还是很明显;fcp的相对于avid优势在于使用成本,当然fcpx剪辑思路上更大胆一步;premiere也后来者慢慢跟上(当然,你懂的使用成本…..);当然还有davinci resolve在剪辑上下的功夫也有后来者居上的…..
-

顺便想问下,如果最后一步不用lut,我们应该怎么去风格化呢
-
谢谢小叶子姐姐
-
老师老师,可以分享一下有什么地方可以找到一些拍摄素材做练习素材吗,非商用,只做练习
-

为什么用了lut之后,参数也调了,却是有点灰的效果。
-
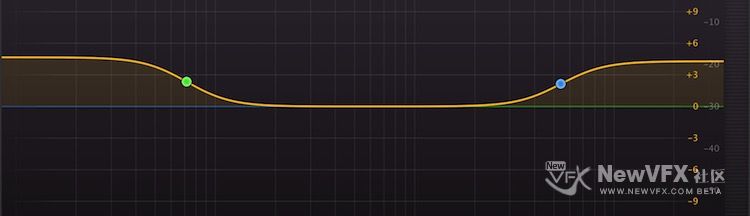
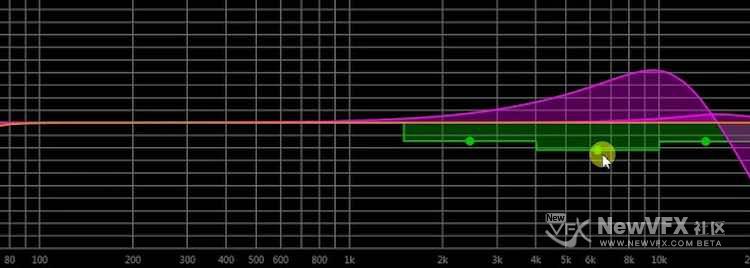
滤波器可以在频率的末端产生滚降,可以减弱增强某个频率范围上的响应,比如(低通、高通、带通)三种过滤器。
低通:就是切掉高频率部分的信号,让低频率的信号通过,所以也叫高切。(如下图中右侧的曲线)
如果你是做平面设计、影视后期的,这部分可以这样理解,相当于一个Curves曲线,调整曲线来调整高光、中间调、暗光,而在音频中是高音、中音、低音。
高通:切掉低频率部分的信号,让高频率的信号通过,所以也叫低切。(如下图中左侧的曲线)
带通:就是切掉高频率、低频率的信号(高通、低通同时使用),让中间频率的信号通过,波形很像个桥洞😄。(如下图中全部曲线调整)

有些监听音箱的分频式滤波器就是由低通、高通和带通组成的。他们分别把高音、中音、低音输出到对应的三个扬声器🔉。
滤波器用…
-
均衡的类型(Types of EQ )按频率响应形状划分
在设定为提升时,响应为峰值的均衡形状好像是一座小山或山峰。
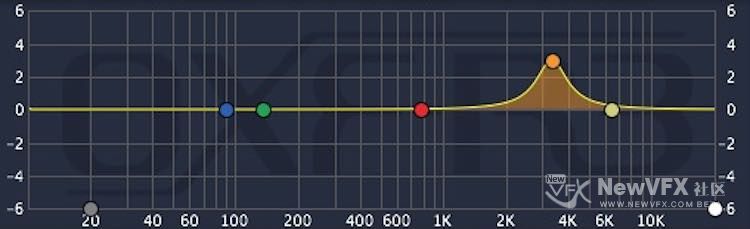
使用架棚式均衡时,其频率响应的形状类似于一个架棚。
-
均衡的类型(Types of EQ )按照样式划分
均衡器的种类由简单到复杂。最基本的类型就是低音和高音控制均衡器(也叫低频均衡和高频均衡)。通常,这种均衡器在100HZ(用低 频均衡旋钮)和10kHz(用高频均衡旋钮)处的电平可以提升或衰减15dB。
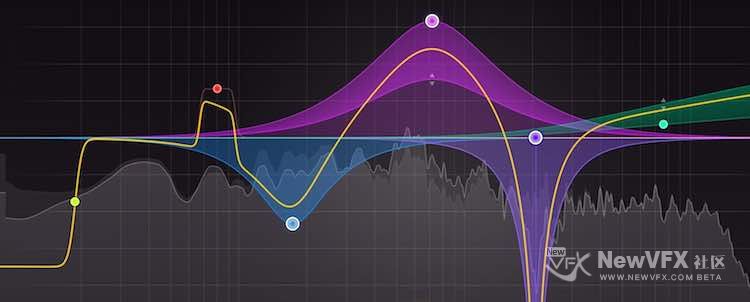
三段均衡可以在某个固定的频率提升或衰减低音、中音和高音(图10.3)。可扫频的均衡更 为灵活,因为可以微调到所需的更为精确的频率范围(图104。如果调音台上有可扫频的均衡时 把一个旋钮设定到中心频率后,另一个旋钮可用来设定提升或衰减的总量。
参数式均衡可以分别设定频率、提升或衰减的总量以及频宽—–起均衡作用的频率范围。一个均衡器Q值称为品质…[查看更多]
-
从标准制作流程而言是不能片子渲染好后再来调色的,调色渲染始终是整个影视制作的最后一个环节,需要在原始素材上渲染。建议走回批套底流程:
出于某些特殊原因,调色已经渲染过的成片,一般情况下探测好剪断后,直接开始调色;特殊情况:如果淡化的部分色彩冲突大,就需要单独剪辑出淡化部分来做调色。
-
@zsc333 你好,您提的问题,达芬奇中使用限定器的正确方法:1,选择吸管工具;2、将下方操作栏切换到限定器模块;这时候可以开始选择颜色了。3,想要看到限定器选出的遮罩区域,可以在视频播放器上选择“✨”图标来开启或者关闭显示。限定器的用法可以查看这篇文章:
如果后续操作有问题,欢迎👏提问噢~~ - 查看更多