VFX小布丁
@VFX小布丁
5天, 18小时 前在线-

大家好,我是紫罗兰,许久不见👶,十分想念V友们,社区里作出重要贡献的人越来越多,罗兰呢,就专门负责编辑收尾😭。记得已经整理过一篇 一点一滴的那些事的帖子,提供的素材非常好,同时也给出了不一样的调色思路。今天罗兰就在满足调色流程的基础上,使用这个片段素材,整理出一个快速调色灰片的流程,基本上能满足常规片子的快速调色:
调色后:
【达芬奇调色】简单三步快速调节草原蓝天翠绿风景(图文教程)
调色前:下面我们来学习具体的操作流程:

-
非常感谢
-
第四步. 创建个风格化效果。这里用了最简单的办法lut,这里我们添加了一个3Dlut里的 arri,颜色瞬间浓郁到压不住的赶脚。不过浓郁的色彩倒是出来了。在加了lut节点的后面我们再增加一个串行节点,在此串行节点上添加遮罩(…[查看更多]
-
第三步. 增加局部天空,草地的饱和度。这里添加了两个并行节点:分别调节天空、草地。这里特别强调为了避免溢出颜色,我们不使用限定器而使用了更加保险的 lut VS Sat来分别调节天空,草地。


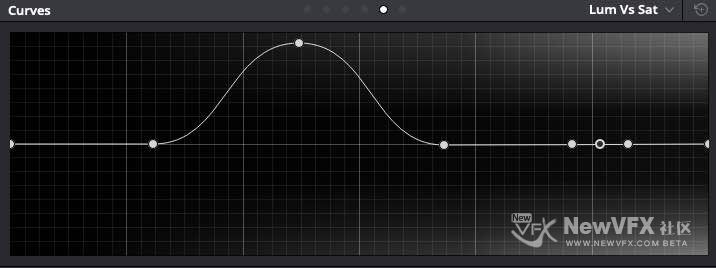

一般而言基本图片的色彩就到此为止了。后续的风格调整,色系调整就在此之上增减颜色,调节渐变,增加暗角,调整风格即可。
-
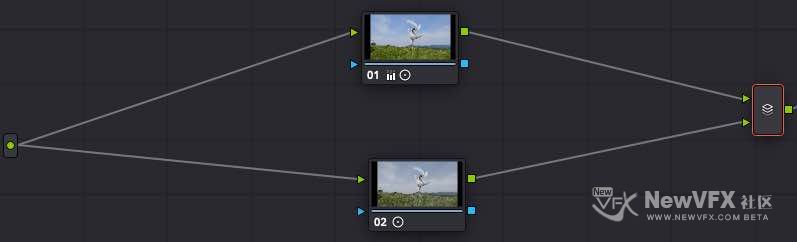
第一步. 增强灰片的饱和度、对比度到一个混合节点(默认光学混合)。为看的清楚(便于调节)添加两个并行节点,分别输出对比度、饱和度,恢复基本颜色。


-
首先分析素材:这是一张拍摄得很棒的灰片,(罗兰本人的感觉是人物的锐度差了一点点,对焦不是很实)但对于这种大全景的画面来说,已经是很棒了)。调色思路如下:1. 恢复灰片的色彩。 2. 加强天空的蓝色。3.增加绿色植物的鲜艳度。 4. 进行一点风格化处理出片。这个流程比较简单,主要是为了简单快的满足大多数片子的调节。
下载素材:
灰度图片下载:
-
大家好,我是紫罗兰,许久不见👶,十分想念V友们,社区里作出重要贡献的人越来越多,罗兰呢,就专门负责编辑收尾😭。记得已经整理过一篇 一点一滴的那些事的帖子,提供的素材非常好,同时也给出了不一样的调色思路。今天罗兰就在满足调色流程的基础上,使用这个片段素材,整理出一个快速调色灰片的流程,基本上能满足常规片子的快速调色:
调色前后视频效果对比:
调色后:

调色前:

下面我们来学习具体的操作流程:
-

建议仔细看看贴子中的流程,照着填写参数出来的流程估计都会不错。1,这个画面色彩没有还原。2. 人物没有突出出来(人物,背景没有分离)。3.色彩方面矢量波形指示器显示的状况来说是不符合出片标准的噢(色彩处理完事需要提交给DT数字质量管理来检测的)。
还是建议按照帖子里的标准流程先走一遍~~~😄。 加油~~
-
-

-

-

协作实例–常用协作流程案例
这里简要介绍项目建立后最常用的协作工作流程,负责人(剪辑师),和调色师是如何协同工作的。
负责人和协作者打开项目
在负责人和协作者打开同一个项目并选择了相同的时间轴后,协作者开始进行调色,负责人继续剪辑时间轴上的影片。
合作者发布做好的调色更改
协作者完成对一系列片段的调色后,例如对场景中的每个影片进行调色之后,协作者单击 “Collaboration 协作”弹出窗口(“铃声”按钮)并选择 “Publish All Changes 发布所有更改”。 所有者工作站上的铃铛按钮立即亮起,并且剪辑也会变为突出显示,以提醒负责人已经有了可用的更新。
负责人更新片段
单击 “Collaboration 协作”弹出窗口并选择 “Update All…[查看更多]
-
使用协作工作流程
一旦所有者和一个或多个协作者设置为在同一个项目上工作,所有者和协作者一起工作的实际过程就相当简单。

更新项目的基本规则如下:
>协作者所做的更改:必须由每个协作者使用一个发布(Publish)命令; 然后负责人可以使用Update命令来更新时间轴。
>负责人所做的更改:当所有者更改时间轴时,项目必须保存一次; 协作者只有在使用 “Reload Project 重新加载项目”命令时才会看到这些更改。
在协作模式下,所有用于发布、更改、更新、还原或重新加载项目的命令都可以在此按钮内找到,其中的响铃图标位于屏幕底部的齿轮按钮 (Project Settings 项目设置)…[查看更多]
-
开放项目进行协同工作
在协同工作流程中,管理员分配的其中一个制作人是时间轴的负责人(项目经理P.M)。通常开设项目的第一个人是项目负责人(P.M),也是唯一允许在媒体池中添加媒体或创建容器的人,同时也只有P.M才有权限在剪辑工作间更改时间线上的剪辑。

一旦项目负责人创建工程,协作者也可以在其他工作站上打开同一个项目。通过这种方式,负责人可以分配任务给调色师,或者编辑元数据的助理,以供负责人统一协调使用。这些已发布的工作可由负责人审核(可以单次/批量接受或驳回剪辑),也可以设定为自动接受其他制作人发布的更改。
这里有个重点,在协作工作流中,共享项目应该使用集群存储服务器(SAN)上的媒体,并且每个所有者和协作者可以正常连接到该SAN,以便他们协作项目正确链接到同一媒体。(简单的话说就…[查看更多]
-
设置协作的前提条件
多用户协作工作流允许在协作项目中同时进行剪辑,色彩分级和元数据输入。多个制作人可以同时访问同一项目中的同一时间线。例如,剪辑师,调色师和在媒体管理间执行元数据输入的助理都可以在同一时间轴上同时工作。为了适应这种情况,必须将协作工作流程中的时间轴设置为使用远程调色。

协作工作流程中的所有参与者必须:
→ DaVinci Resolve的Studio版本
→ 正确配置的数据库服务器
数据库服务器可以是主动使用的Resolve工作站之一,也可以是安装了DaVinci Resolve的网络上的另一台计算机,只是用于托管项目,工程数据库服务器不需要加密狗或视频卡,参与协作工作流程的所有计算机必须位于同一网络上。…[查看更多]
-
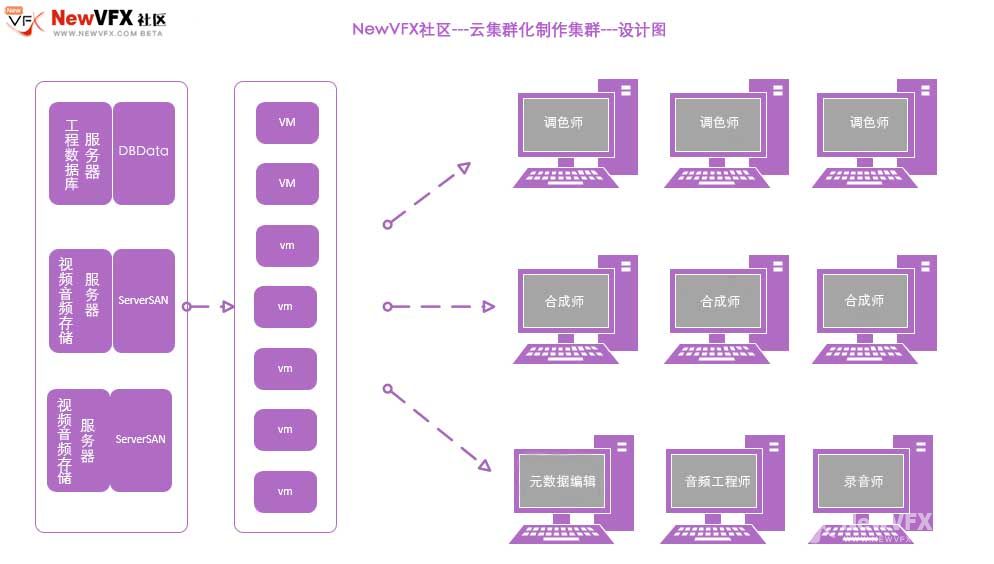
大家好,我是追光,上一篇文章中我们学习了如何组建达芬奇工程数据管理服务器,有了服务器之后,不仅仅可以统一管理工程文件,数据库。其最重要的应用场景是集群化协同制作。达芬奇的内置剪辑,合成,调色,音频,渲染工作间流程足以满足大多数广告,电影,短片的制作,相对比较轻快且集成程度非常高。

集群化制作(Pipeline)到底是啥?简单来说就是多个制作人可以同时打开同一项目中的同一时间轴并同时工作。 例如,剪辑师、合成师、调色师和音频制作人可以在同一时间轴上同时工作,大家可以同时看到作品的整体效果。
顺带拓展一点小知识:国际上主流的大规模集群化制作管理协同系统:shotgun,Ftrack、NIM Labs、Producer、CGWire等可以整合不同的软件,比如Nuke,houdi…[查看更多]
-
如果工程很重要,可以尽力找回。达芬奇默认的工程文件存储数据库隐藏在系统内部,进入数据库存储目录—找到当前达芬奇所使用的用户名—查看目录下有没有工程文件名.db 的数据库文件。有的话,大多数情况是可以找回的,这也是达芬奇数据库存储工程的优势之一。
On OS X:Library/Application Support/Blackmagic Design/DaVinci Resolve/ Resolve Disk Database
On Windows:
C:ProgramDataBlackmagic DesignDaVinci ResolveSupportResolve Disk Database
可以进一步参看下这篇文章:
-
-
设置Project Server时的故障排除技巧:
上述操作流程为,一切操作均正常的操作流程,但在实际设置中。会存在网络是否能正常Ping通,文件权限是否可读写之类的问题。可能是因为数据库服务器无意中配置错误,可以通过以下方式查看问题所在:
1. 检查PostgreSQL是否正常运行
要仔细检查PostgreSQL是否正常运行,可以打开终端并输入以下命令:
ps -ef | grep PostgreSQL
如果一切正常,则此命令输出的文本应返回类似于以下内容:502 118 1 0 12May14 ?? 0:12.77 /Library/PostgreSQL/8.4/ bin/postm…
- 查看更多




好东西
谢谢分享
对于实践练习会有很大的帮助,有问题可以留言