追光
-

Stylo G x Jacob Plant迄今为止最个人的音乐视频。

-

魔灯说 发了新动态 5年, 10个月 前
这才是Raw视频转为DNG序列,Mov最好用的软件,界面直观、操作简单:
-
非常高兴能在《孤岛惊魂6》预告片中分享最新的完整CGI工作! 打破了所有令人赞叹的记录!

-
《人造卫星》是一部马克西姆·采斯特科夫(Maxim Zhestkov)的短片,讲述了外星人的思想的演变及其走向光明的旅程。
该项目是在来自世界各地的顶级艺术家帮助下制作的,这些艺术家包括:美国,英国,加拿大和俄罗斯。
完整的CG动画短片的制作耗时一年半, 全部通过远程协同完成该项目。 Max […]

-
简介:海洋生物学家,哥伦比亚马尔佩洛基金会的创始人桑德拉·贝索多(Sandra Bessudo)回顾了她第一次对马尔佩洛岛的探险,无限的美丽使她重返世界30多年,致力于保护生命。
但无论如何保护,仍然无法幸免世界范围内各种鲨鱼族群的大规模消失。

-
亚马逊的电视连续剧《高城堡的男人》探讨了另一种现实,即德国和日本赢得了第二次世界大战,而纽约处于德国的控制之下。
ZOIC工作室负责创建这个新的想象中的世界,其想法偏向于实用性、组织性强,才华和创意更少。 大部分是在没有绿屏的真实位置拍摄的,后来CG版本取代了背景。视觉特效团队还辛苦地更改了路灯,人行横道和路标,以营造一种更冷酷平淡的感觉。
本影片通过Deadline使用Amazon的AWS服务器设置了云渲染, […]

-
作者于2019年2月在马德拉岛的家庭旅行的一些印象。 疫情期间
拍摄和编辑FKY©

-

参数可以在Maya内以动画层的方式使用。
可从菜单: oLineup/Orientation Controls 中打开。按钮安装在 Lineup/Orientation Controls.
-

这个插件具体怎么安装,没看懂
-
对了3DE的插件安装方式可以参考这篇教程里面的第二部分:
-
-
-
将播放范围结束设置为当前帧,将播放范围开始设置为当前帧。

-
由VFX主管Ferran Domenech领导的MPC的VFX团队与导演Ridley Scott和生产VFX主管Charley Henley一起为《异形:盟约》制作了700多个令人惊叹的镜头。
作为主要工作室,MPC的工作包括创作恐怖电影,外星环境,车辆和复杂的FX模拟作品。
本影片均采用3DEqualizer追踪匹配:
3DEqualizer摄像机反求软件使用教程

-
将objectPGroup运动路径中心点到选定的3dpoint。 运动保持不变,仅修改中心点。
在“Lineup Controls->Editor”中作为选项显示。
烘培objectPG motionpath pivot 到新点
在我们追踪得到非常完美的结果后,在三维与实景合成中非常完美:
但经常出现从顶视图、侧视图看下来:运动物体的中心店与模型并未重合,甚 […]
-
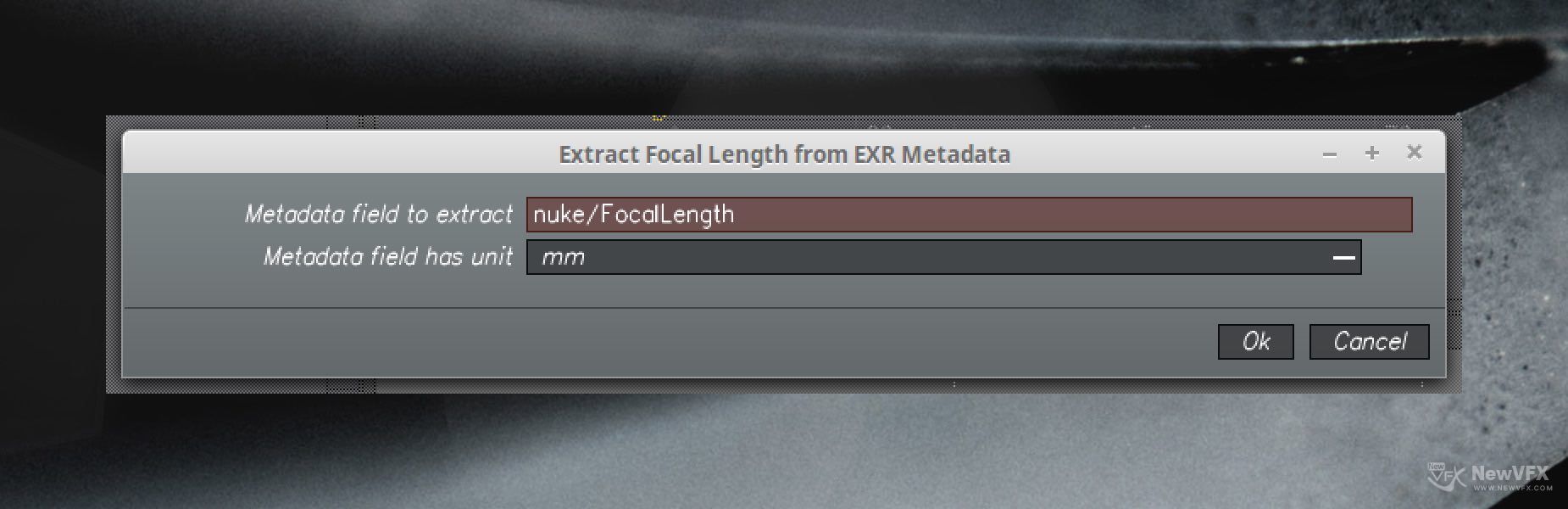
从OpenEXR图像的元数据中提取焦距到当前摄像机的焦距曲线中。 该脚本将出现在“Manual Tracking Controls::Edit(手动跟踪控件::编辑)”中
Extract Focal Length from OpenEXR Metadata
提取 Field of View from OpenEXR Metadata
-
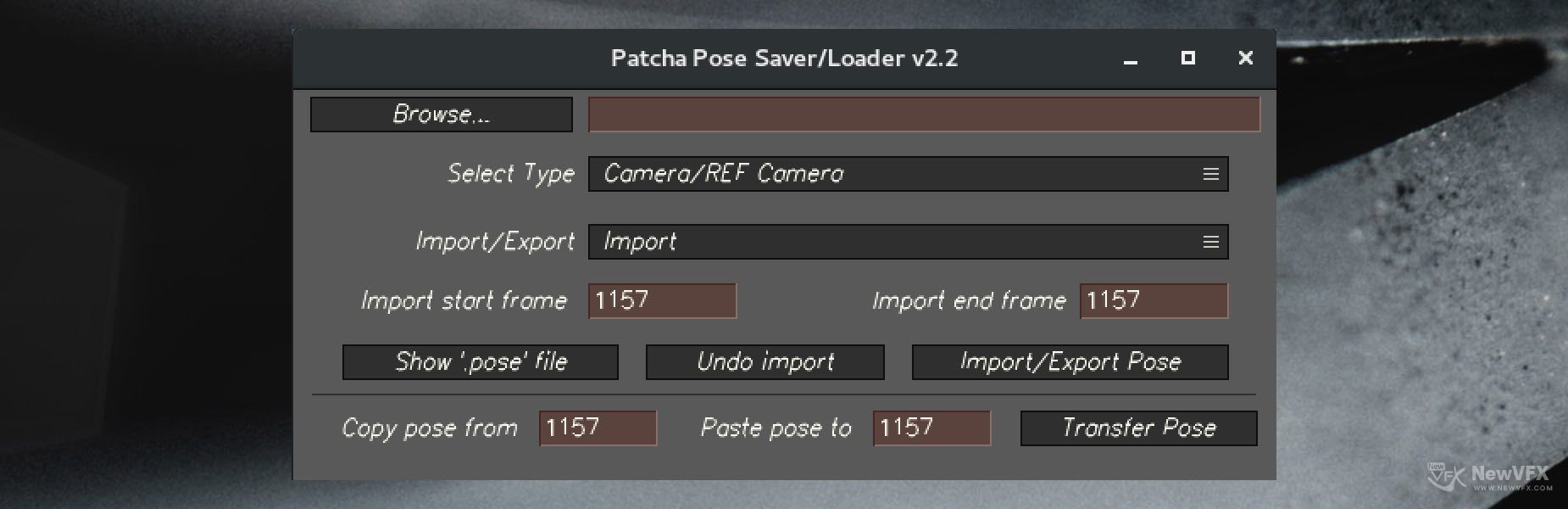
从.pose文件导入3D rot / pose通道,以 .pose的形式独立保存场景匹配对位。
在Main Menu(主菜单)(3DE4)中可见。
Pose Saver/Loader 界面
Pose Saver/Loader 操作
-
大神 你好,我想问问素材变速的,跟3de跟踪怎么跟踪啊? 在跟踪软件里什么操作需要设置的吗?
-
-
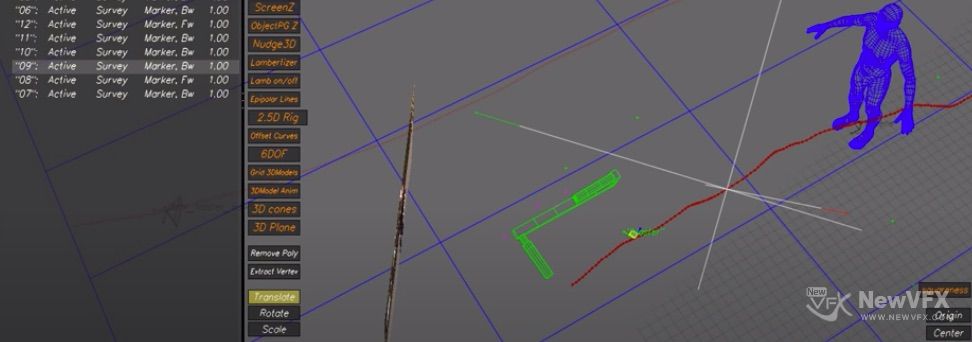
通过运动物体上的一个追踪点,为objectPGroup创建2.5D装备绑定设置。
Creates 2.5D Rig setup to objectPGroup
Creates 2.5D Rig setup
Creates 2.5D Rig
-
这是什么插件 下载后 突然发现不会用 怎么用啊? 哈哈。。
-
这要怎么用啊 就一个python文件 也没有视频啥的
-

在这个插件安装里面的二:里面刚好有写了3DE的python脚本的安装目录,将py文件复制到3DE4文件夹:sys_data> py_scripts下,然后重启3DE就加载上去了。在这篇3de内容里有安装方法:
-
OK感谢感谢~
-
-
-
-
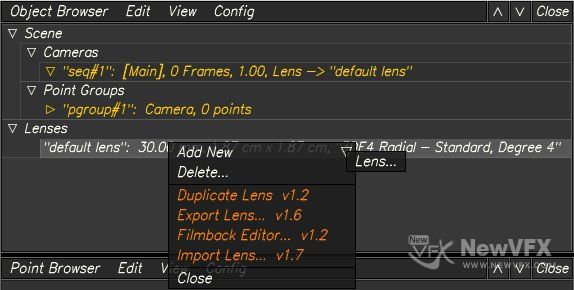
脚本位置:
要找到脚本,请在“Object Browser(对象浏览器)”中右键单击 lens object (镜头对象)。
Filmback Editor V1.2
-
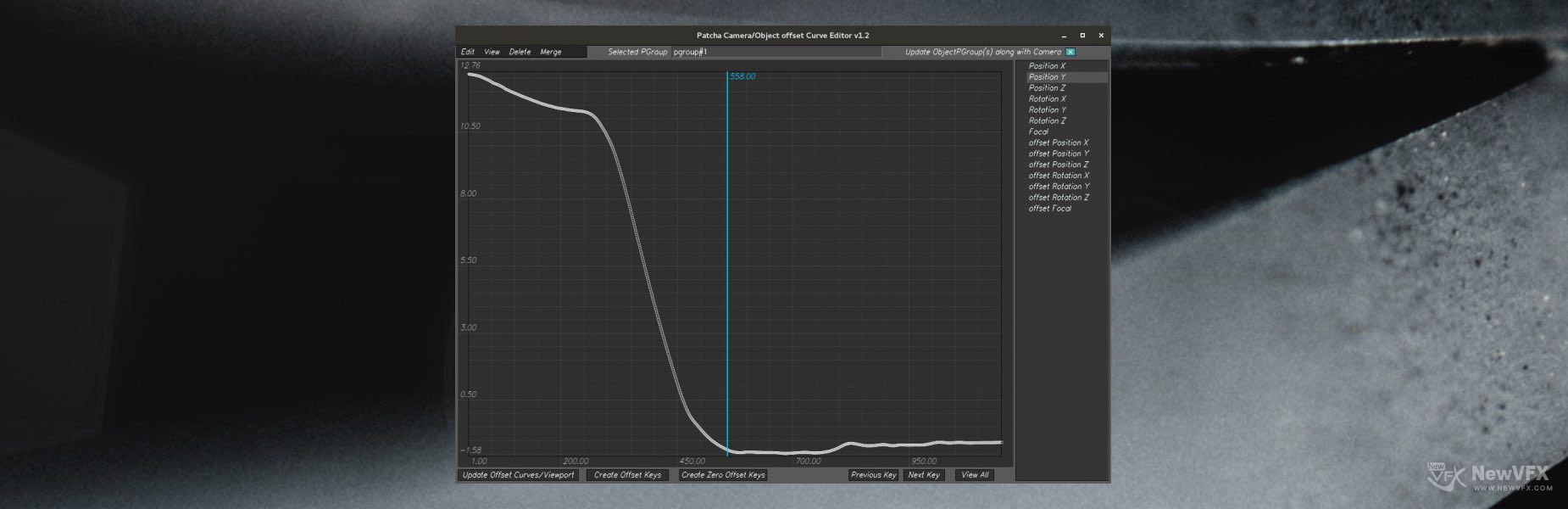
在场景匹配中我们经常用到pose,存储当前帧摄像机位置与场景匹配对位的状态。使用F5查看存储的姿势(Pose),此脚本可以实现在时间线上的姿势之间向后、向前跳转。
在Python菜单中可见。

-
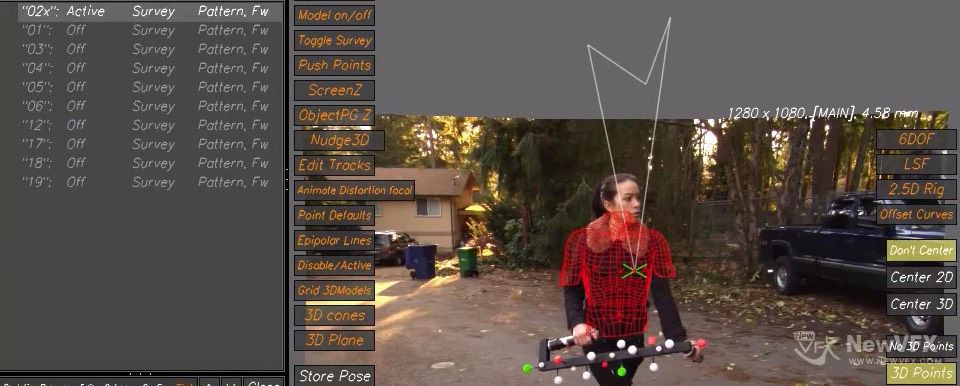
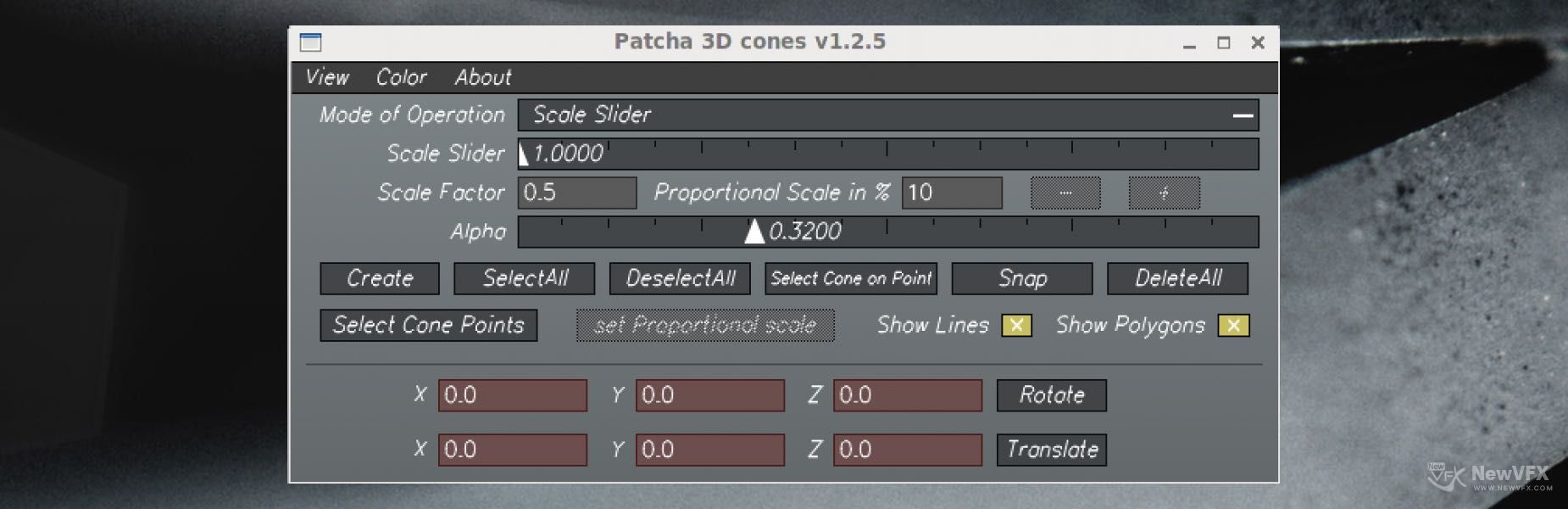
在选定的3D点上创建3D圆锥体。脚本可以在“Lineup Controls 和 Orientation Controls.”下的按钮中找到。
使用该工具创建圆锥三维模型1
使用该工具创建圆锥三维模型2
-
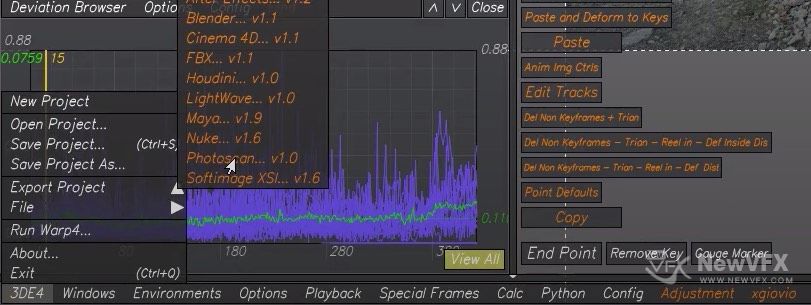
创建一个包含所有项目数据的py脚本文件,可以将其导入Photoscan以构建点云。
导出工程–Photoscan
导出工程参数设置
-
移动3DModel轴并通过吸附(snapping)进行变换。
在“Lineup/Orientation”中显示为按钮。

-
将3DEqualizer当前选择的镜头对象写入Blackmagic Fusion设置文件中 该脚本还支持导出动画镜头失真 已经测试兼容版本:Blackmagic Fusion 8
- 查看更多