Activity
表里如一,知行合一,能量因此觉醒

-

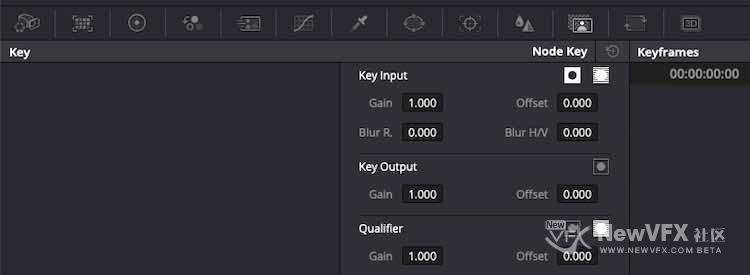
刚刚打开看了一下,是这样的。你可以再看一下!如果屏幕分辨率太低是处于折叠状态的:
-

为什么我的达芬奇没有key这个按钮和相关选项,是版本问题还是设置的原因,谢谢老师!
-

Vr全景视频跟踪和稳定
CaraVR的2D追踪器可以从模式菜单选择平移,倾斜和滚动中提取动画数据。然后直接应用数据或匹配运动到另一个元素;也可以反转数据值并将其应用于原始元素以稳定图像。
C_Tracker与2D的跟踪器的不同之处在于跟踪锚点不包括搜索区域。这是因为C_Tracker搜索每个追踪的全部图像。添加多个追踪点时,不会像Nuke的跟踪器那样影响性能。


Nuke的Tracker节点。
CaraVR的C_Tracker节点。C_Tracker可以在latlong空间中进行跟踪,可以在VR360度环境中进行追踪。
C_Tracker可以使用自动跟踪,用户跟踪或两者结合来得到更好的结果。
好啦,今天小雨的更贴就到这…[查看更多]
-
C_SphericalTransform转化图像和投射
C_SphericalTransform在不同投影之间转换图像:
•Full Frame(全部画面):如 Latlong,围绕一个点包围整个360环境。
•Partial Frame(部分画面):例如Nuke设计用于的2D直线视图。
Rotate(旋转):选择视图的位置坐标。
<…[查看更多] -
合成360度全景视频流程
Nuke通过C_SphericalTransform节点将VR空间中的球形画面,通过投影映射为2D空间使其可以像2D画面一样的合成。在Latlong空间绘画(擦除脚架)
Nuke的工具架上已经预置了擦除脚架的节点流程,为提高效率,我们可以直接从工具架中调用。1、单机左侧工具架中CaraVR,然后导航到CaraVR > ToolSet > Latlong_RotoPaint。
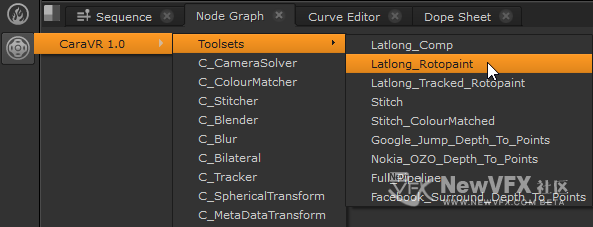
2、工具集将添加指定节点流程的节点图。
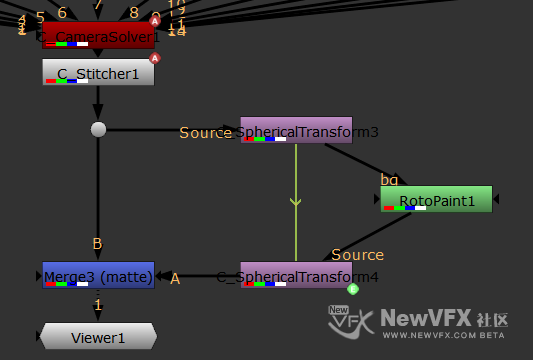
节点…[查看更多]
-
大家好,最近恰巧在做VR项目,基本接近完成,在这过程中把原先的技术流程都归结了一遍。上一篇文章中我们讲解了拼合VR的流程以及常规故障修复方法,拼接好VR视频后接下来要做的事情就是擦除脚架(支架),添加Logo、字幕,或者合成三维元素,去除抖动等操作。 这篇教程里我们主要学习:将2D、3D元素合成到VR场景中。

VR全景合成原理:将VR视频按照一定的算法,将全景画面展平为2D画面,并在2D画面中合成好画面,最后再将2D画面扭曲到VR的球体空间中去,这个过程中最重要的节点是C_SphericalTransform。

下面我们来学习VR全景的合成流程:(以Nuke为例,所有软件中VR合成的原理都是一致的)
- 查看更多