Activity
表里如一,知行合一,能量因此觉醒

-

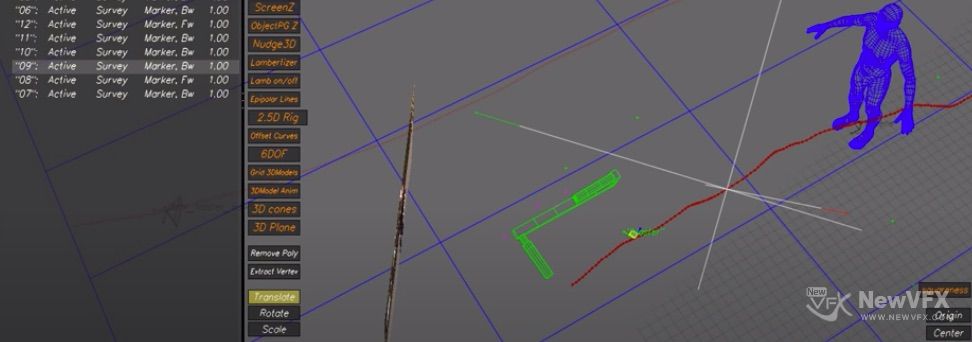
将objectPGroup运动路径中心点到选定的3dpoint。 运动保持不变,仅修改中心点。
在“Lineup Controls->Editor”中作为选项显示。
烘培objectPG motionpath pivot 到新点
在我们追踪得到非常完美的结果后,在三维与实景合成中非常完美:
但经常出现从顶视图、侧视图看下来:运动物体的中心店与模型并未重合,甚 […]
-
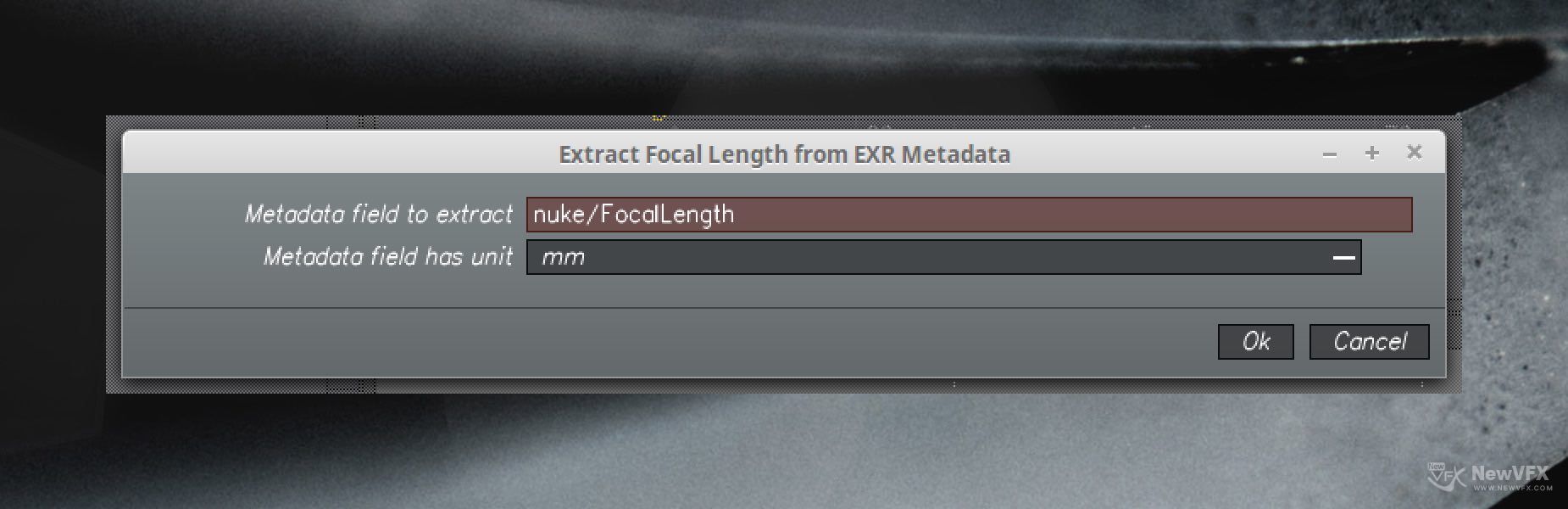
从OpenEXR图像的元数据中提取焦距到当前摄像机的焦距曲线中。 该脚本将出现在“Manual Tracking Controls::Edit(手动跟踪控件::编辑)”中
Extract Focal Length from OpenEXR Metadata
提取 Field of View from OpenEXR Metadata
-
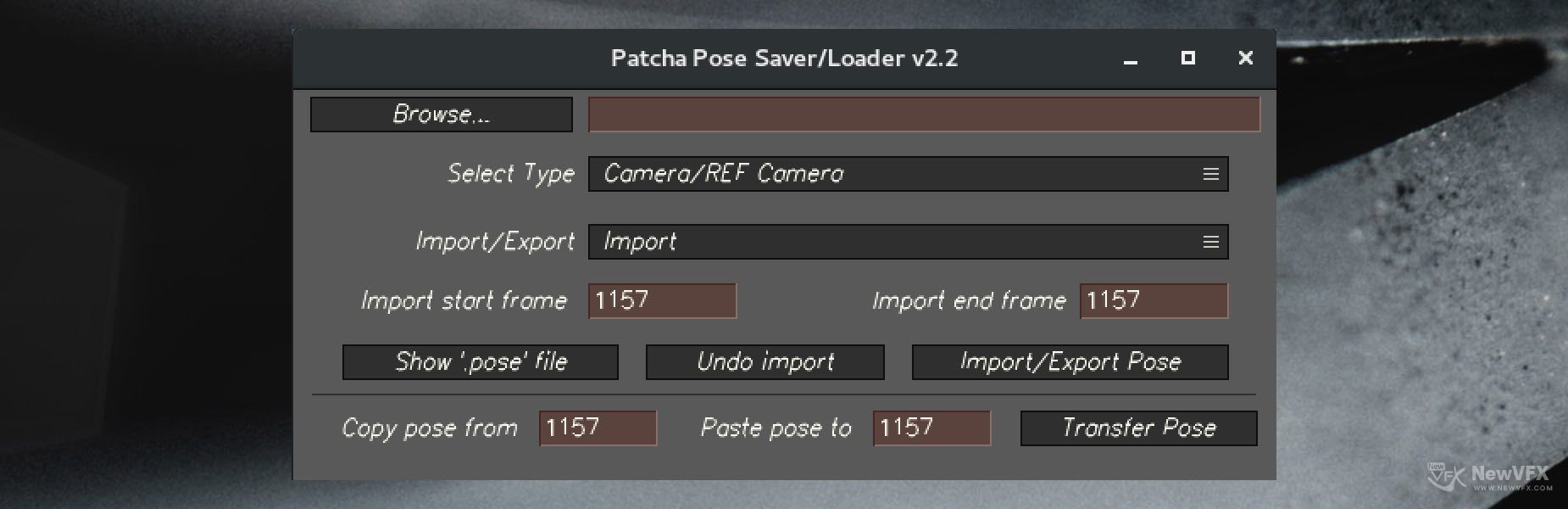
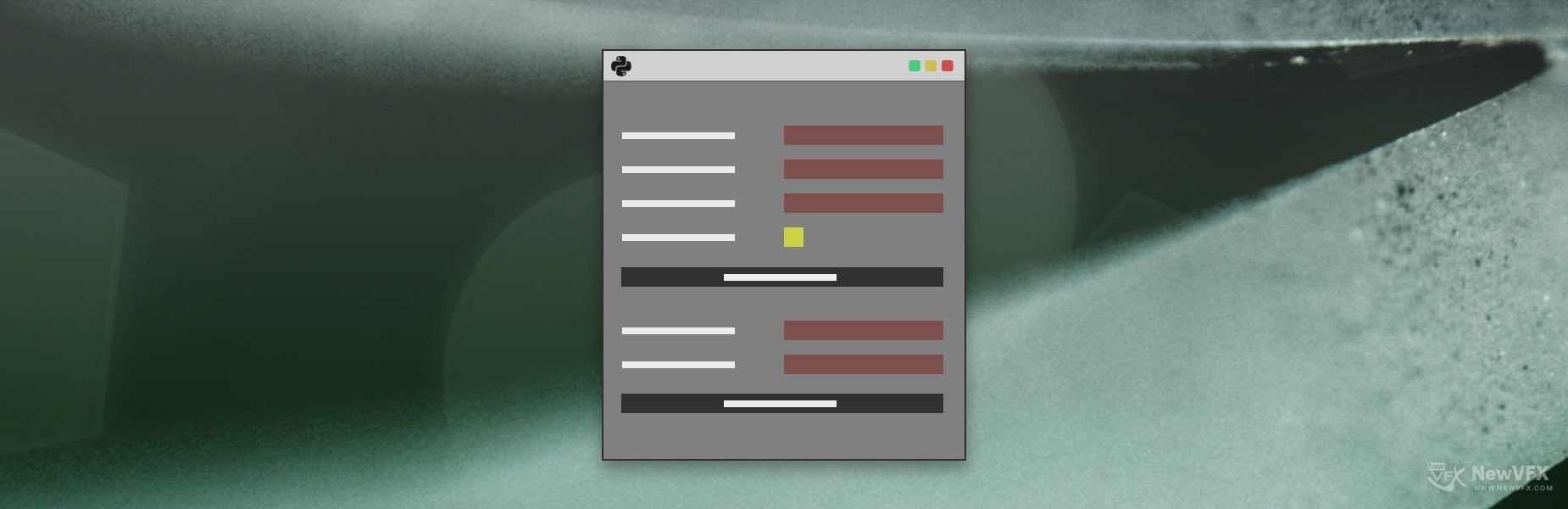
从.pose文件导入3D rot / pose通道,以 .pose的形式独立保存场景匹配对位。
在Main Menu(主菜单)(3DE4)中可见。
Pose Saver/Loader 界面
Pose Saver/Loader 操作
-
大神 你好,我想问问素材变速的,跟3de跟踪怎么跟踪啊? 在跟踪软件里什么操作需要设置的吗?
-
-
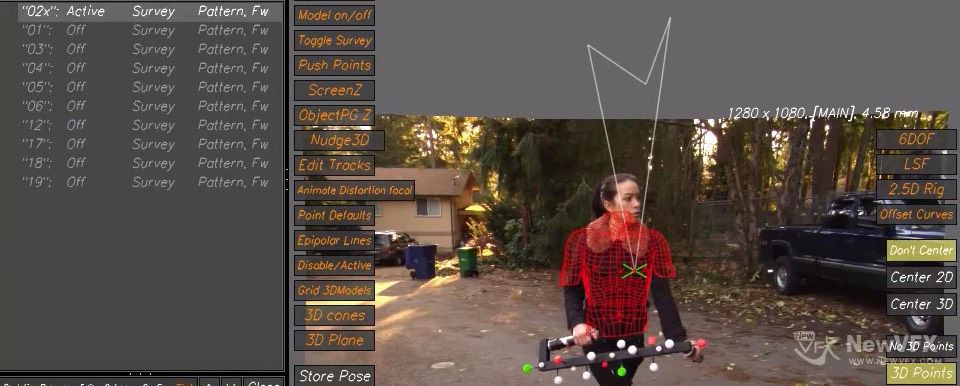
通过运动物体上的一个追踪点,为objectPGroup创建2.5D装备绑定设置。
Creates 2.5D Rig setup to objectPGroup
Creates 2.5D Rig setup
Creates 2.5D Rig
-
这是什么插件 下载后 突然发现不会用 怎么用啊? 哈哈。。
-
这要怎么用啊 就一个python文件 也没有视频啥的
-

在这个插件安装里面的二:里面刚好有写了3DE的python脚本的安装目录,将py文件复制到3DE4文件夹:sys_data> py_scripts下,然后重启3DE就加载上去了。在这篇3de内容里有安装方法:
-
OK感谢感谢~
-
-
-
-
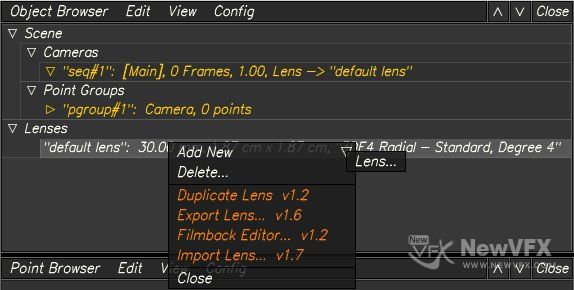
脚本位置:
要找到脚本,请在“Object Browser(对象浏览器)”中右键单击 lens object (镜头对象)。
Filmback Editor V1.2
-
在场景匹配中我们经常用到pose,存储当前帧摄像机位置与场景匹配对位的状态。使用F5查看存储的姿势(Pose),此脚本可以实现在时间线上的姿势之间向后、向前跳转。
在Python菜单中可见。

-
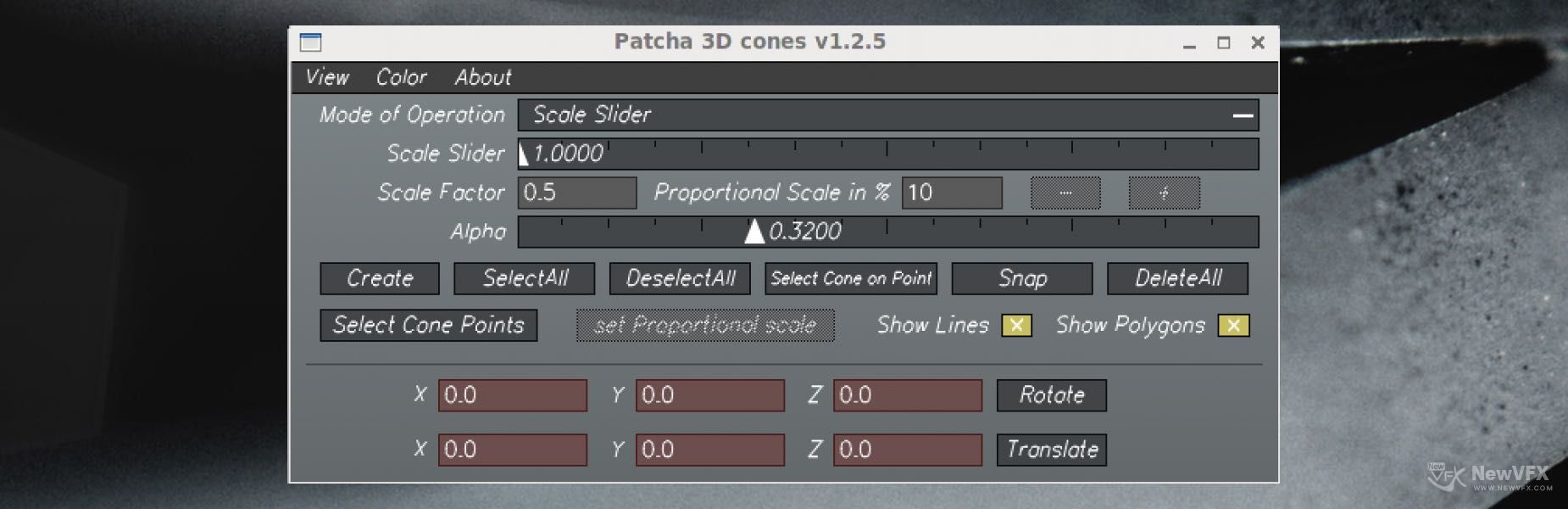
在选定的3D点上创建3D圆锥体。脚本可以在“Lineup Controls 和 Orientation Controls.”下的按钮中找到。
使用该工具创建圆锥三维模型1
使用该工具创建圆锥三维模型2
-
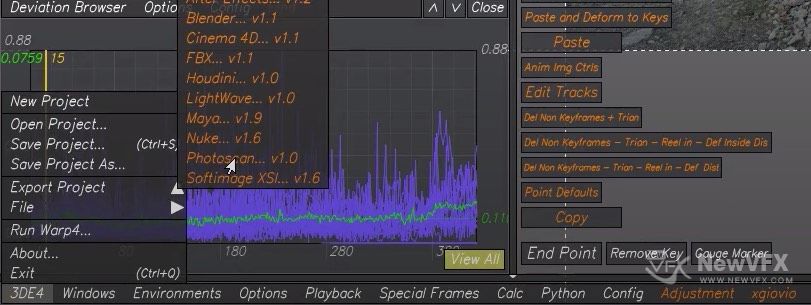
创建一个包含所有项目数据的py脚本文件,可以将其导入Photoscan以构建点云。
导出工程–Photoscan
导出工程参数设置
-
移动3DModel轴并通过吸附(snapping)进行变换。
在“Lineup/Orientation”中显示为按钮。

-
将3DEqualizer当前选择的镜头对象写入Blackmagic Fusion设置文件中 该脚本还支持导出动画镜头失真 已经测试兼容版本:Blackmagic Fusion 8
-
导出完整的2D追踪点数据,包含以下数据:
导出2D轨道,包括: -点的关键帧 X、Y轴坐标数据 -追踪边界设定 -所有测量点 -点集合 -点的权重曲线
所有导出的点的数据将保持不变,不会发生偏差
此版本的新功能:
点数据集合点权重曲线
-
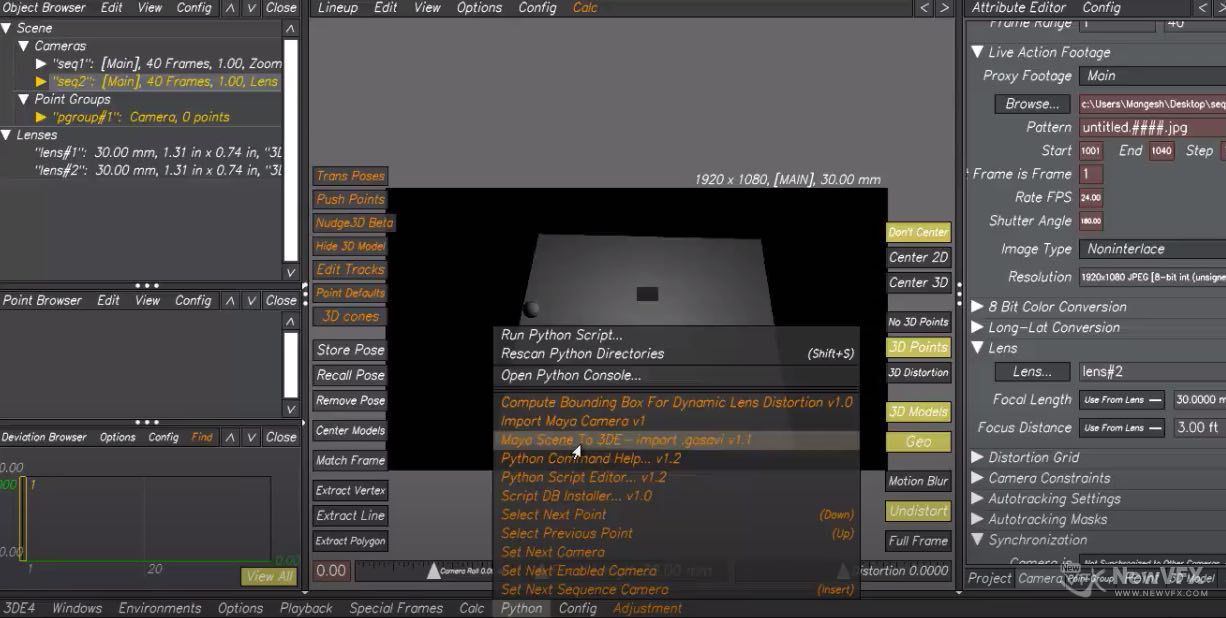
这是一个非常棒的工具,可以通过单个文件格式“ .gosavi”一次将整个Maya场景(多个摄像机,多个对象轨迹,定位器,场景几何模型 […]
-
可以在3DEqualizer的3D控制面板中在本地,全局,屏幕空间中微调摄像机,对象,3D模型或场景的平移,旋转和缩放。
在 “Lineup/Orientation”中显示为按钮。 在“Lineup/Orientation”的“ Edit(编辑)”菜单中可见。

-

继续昨天发布的3DE与Nuke10-12专用套件后,还可以直接将3DE计算的数据传输给Nuke11:
-
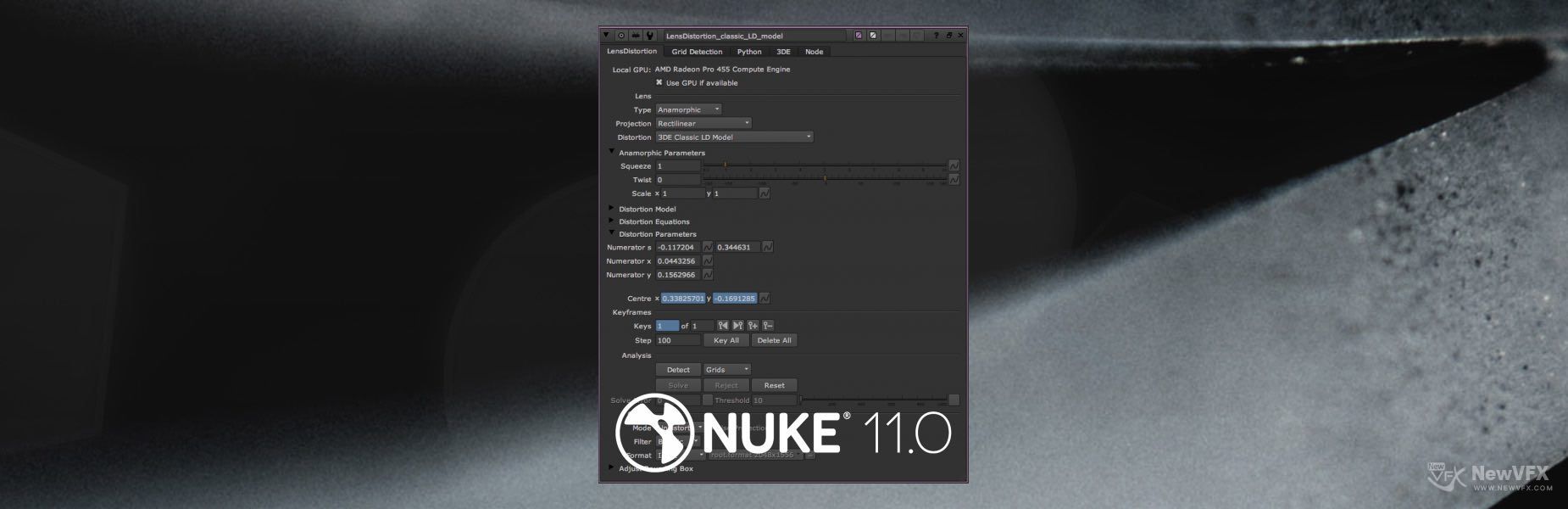
可直接把3DE内计算好的摄像机镜头畸变导出到Nuke的LensDistortion节点(导出.nk脚本)
也就意味着,可以用 lensdistortion节点直接处理 3DE镜头数据。
这使得使用NukeX 11.0及更高版本中新的GPU加速的 LensDistortion节点。
3DE中的所有五个失真模型都与NukeX的新 LensDistortion节点兼容。
此版本的新功能:
1. 更新了代码,遵循 […]
-

第四步、输出不进行裁切的原始画面。默认情况下,Nuke输出已经经过裁切的画面,但我们常常需要不裁切的原始画面。
常见问题:原始视频(1920*1080) >畸变矫正后画面会发生变形,边缘会扭曲,画面被放大 > 但Nuke默认以同尺寸直线裁切可框选区域。
处理思路:在Nuke中,我们可以这样处理,对畸变矫正后的画面进行Reformat,并调整画面大小,使其能显示完整的画面。
处理后的结果:
-
解压完毕后,得到DNG序列,目前处理dng序列有两种方法:
建议在达芬奇中使用DNG进行调色,仅仅达芬奇调色系统支持直接处理dng,并可以自行设置摄像机元数据,像Red one摄影机、BMCC一样的流程:
另外,具体的操作流程可以参照社区内任意一篇…[查看更多]
-
请问一下,解压完如何使用?
-
第三步、打开Nuke软件界面,按下R读取刚才在 3DE中进行矫正的素材,并正确设置素材的宽高、像素比。然后将刚才从3DE中导出的.Nuke文件直接拖到工程里,会自动添加一个LD_3DE4+素材名的节点:
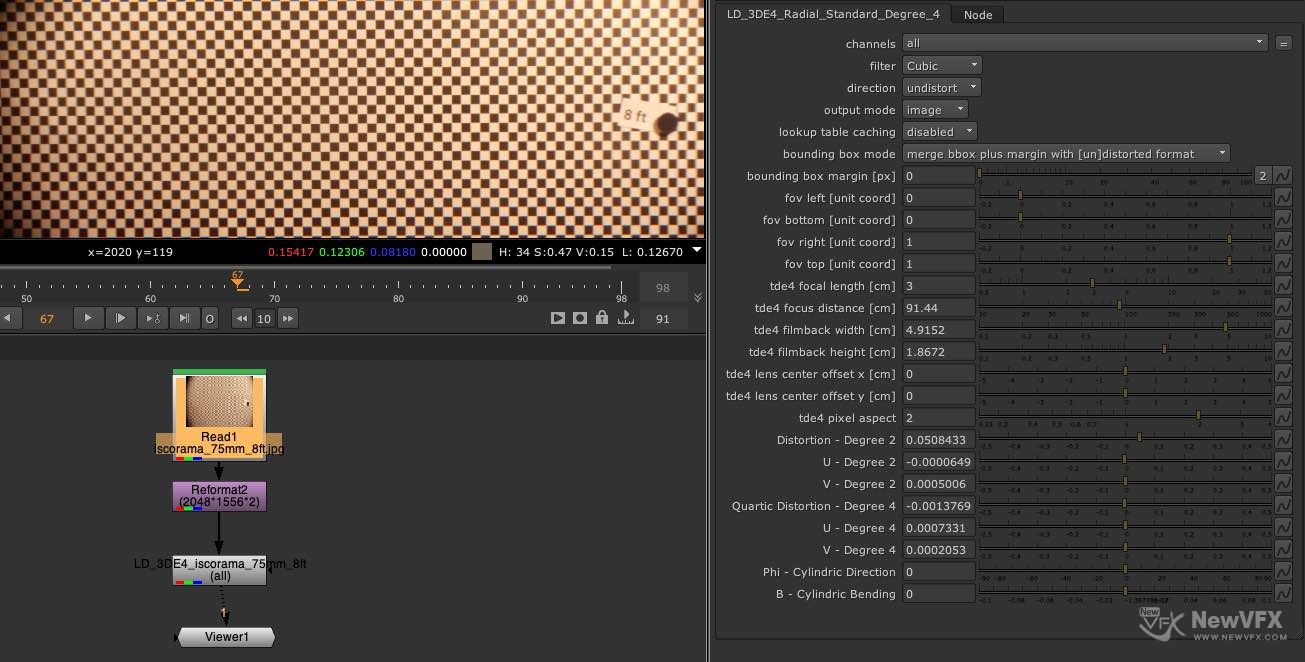
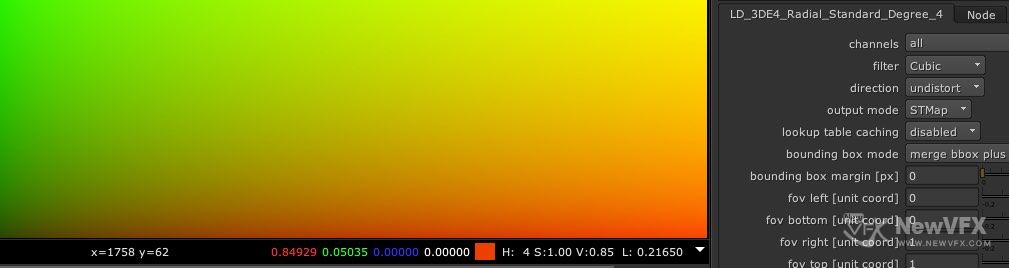
在此节点上,可以选择Distort, undistort,也可以输出这两种类型的STmap:
-
大家好,我是追光,今天是9月1日,非常特别的日子“开学“,停滞大半年的校园再次启动,各行各业在陆续恢复,沉寂许久的VFX大学,也得更新啦。

3DEqualizer参与制作的电影
从2017年就有许多制作人问过:怎么把3DEqualiazer里的镜头畸变数据导出到Nuke? 如何把3DE镜头数据给反过来应用到三维制作的镜头里?今天我们就通过实例来讲解如何将3DE数据导出到Nuke中。
不管3DE自带的功能还是Nuke上协同的功能,都不能很好的处理镜头畸变数据,需要用到专用的 3DE to Nuke lens distortion套件。制作的目的是让后期制作的元素与前期拍摄无缝拼合,如何拼合?建议在使用前先了解下整个VFX制作中处理数据的流程:
-
 前来支持
前来支持-
灰常感谢,哈哈加油~~
-
-
- 查看更多