Activity
分享你的动态,让大家看到你!

-

EQ(Equalization,均衡器)本质上是一个频率选择性的增益函数:
频谱图(如 Ableton 的 Spectrum、FabFilter 的 Analyzer)实时显示 X(f);EQ 滤波器实际影响的是 H(f);混音时,我们观察频谱并视觉定位问题频段,然后手动绘制 H(f) 来进行补偿或增强。
EQ 不是“修音”,是“重塑频率能量分布”,本质是用数学曲线,对声音进行“能量雕刻”。
它作用于信号的频谱,在特定频率区域 放大(Boost) 或 削减(Cut) 能量。
-
声音是“机械纵波(Mechanical Longitudinal Wave),是一种在介质…[查看更多]
-
鉴于 Waves 插件在混音中的行业标准的地位,以及发展到今天,全球绝大多数专业录音棚、广播电视台、现场演出系统里,都能看到 Waves 插件的身影。以前曾经潦草的写过waves推荐的15个插件的推荐简介浏览量超过10W,随着插件更新,针对每个插件的介绍以及核心功能又重新写了一遍:
-

Waves Stream (音频网络发送/接收程序)
Waves 推出的一款插件与网络服务,旨在实现高质量音频的实时共享,方便音乐制作人、混音师与客户之间的远程协作。通过 Waves Stream,用户可以从 DAW(数字音频工作站)中直接推送无损音频流,供他人通过浏览器或 DAW 插件实时监听。

Waves…[查看更多]
-

魔灯说 在版块 🎥 拍电影-拍摄经验分享社区 中回复了话题 佳能EOS相机升级/降级固件的方法流程 4个月, 3周 前
恭喜你,看来动手能力还是很强,阅读操作流程也非常仔细。按下升级(set)的同时,拔掉电源,使得升级程序进入中断模式,其实就是让相机进入读取固件模式。就这一步很多用户操作时候会出现问题,这样就可以跳过佳能不允许降级的限制。
-
keyboard 在版块 🎥 拍电影-拍摄经验分享社区 中回复了话题 佳能EOS相机升级/降级固件的方法流程 4个月, 3周 前
很好!感谢大佬的方法,成功把1.3.6降到了1.2.3。
-
Clarity Vx:AI 人声降噪插件 Clarity Vx DeReverb:AI 人声去混响插件
Waves 的 Clarity Vx 和 Clarity Vx DeReverb 是两款基于 AI 的人声处理插件,分别用于降噪和去混响。它们都采用了 Waves Neural Networks® 技术,能够快速、精准地提升人声清晰度,适用于播客、配音、音乐制作等多种场景。  
功能与原理
核心功能:通过 AI 神经网络识别并去除人声中的背景噪音,如风声、空调声、街道噪音等。主要控件:
主旋钮(Main Control Knob):顺时针旋转可增加降噪程度,逆时针则减少。
-
人工智能EQ:Waves Curves AQ
一款由 Waves 推出的全新 AI 驱动的自动均衡器插件,被称为“世界上首个自主 EQ”。Curves AQ 的核心是其“Spectral Targeting”技术。插件通过神经网络分析音频,识别其频谱特性,并生成五条独特的 EQ 曲线供选择。
MixSense 功能:在混音上下文中自动调整频率,避免轨道间的频率冲突。
Smart Tilt:快速进行整体音色的倾斜调整,实现明亮或温暖的音色变化。
Offset 功能:在频率轴上平移目标曲线,实现创意性的音色调整。
Frequency Anchors:针对低频、基音、谐波和空气感四个频段进行精细调整。
Curves AQ LIV… -
Pinecone向量数据库的在线使用方法
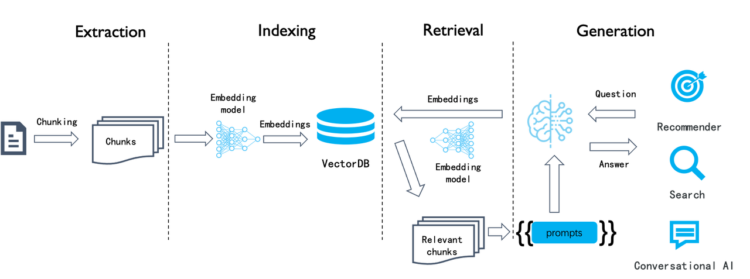
Pinecone 是一个专为机器学习和人工智能应用设计的托管向量数据库服务。它主要用于存储、检索和管理高维向量数据(如嵌入向量),并支持高效的相似性搜索(Similarity Search)。Pinecone 的核心目标是帮助开发者轻松构建和部署基于向量的应用程序,例如推荐系统、语义搜索、异常检测等。
1. 登录并创建项目
访问 Pinecone 网站:打开 [Pinecone 官网]并登录账户。
进入仪表板:成功登录后,将看到一个仪表板界面。
创建新项目:在免费层级(Free Tier)下启动一个新项目。点击“创建项目”按钮,并为项目命名。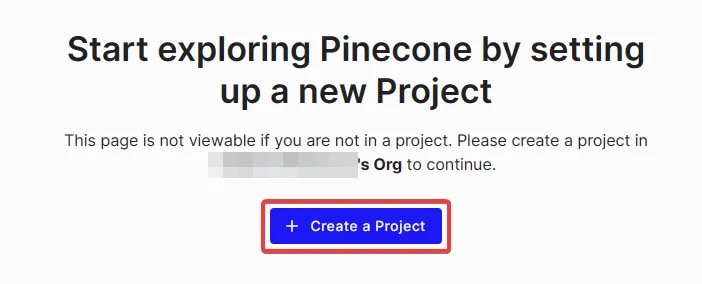
2. 获取 API 密钥…[查看更多]
-
Qdrant向量数据库部署方法以及使用方法
Qdrant 是一个高性能的向量搜索引擎,专为存储和检索高维向量数据而设计。它支持语义搜索、推荐系统、图像检索等应用场景。Qdrant 提供了开源版本以及在线托管服务(Qdrant Cloud),开发者可以轻松部署和使用。以下是 Qdrant 的基本使用流程:
一、安装Qdrant(使用docker安装)
1、拉取静像
docker pull docker.m.daocloud.io/qdrant/qdrant2、运行镜像(在运行前必须要设置api密钥)
docker run -d -p 6333:6333 -p 6334:6334 -e QDRANT__SERVICE__API_KE…[查看更多] -

Elise Trouw 是一位来自圣地亚哥的美籍音乐家、歌手、作曲家和多乐器演奏家,以她出色的音乐才华和创新的视频内容而闻名。她出生于 1999 年,从小学习鼓和钢琴,后来又自学吉他和贝斯。她的音乐风格融合了流行、摇滚、爵士和另类音乐元素,受到 Sting、Radiohead 和 John Mayer 等艺术家的影响。
Elise 最引人注目的是她的现场循 […]

-
我最近在使用3de摄像机反求中遇到了一些问题,也解决了一部分,但还是有很多困惑的地方,同时也有一些想到的方法接下来去实践和验证。
比较好的一些收获是;
1.我在对比中发现,提升 deep tracking(追踪深度)数值并没有显著的提升结算结果,我前期认为提升这个参数数值,应该会显著提升追踪点质量,我把参数给到0.5至0.9之间测试,但后来我发现不提升该参数,得到的结算结果要好的多,同时也节省了很多时间,该参数应该适合应用于特殊的跟踪点,以及拍摄质量不好的时候,使用的时候应当适度。
2.我发现使用图像控件…[查看更多]-
是的,看来你把社区内容看得非常详细,也确实深入到了一个非常深的状态。6s手机刚出来时候,我就开始用来拍摄一些测试。当时就出现了抖动的问题,后来仔细翻看了许多手机摄像头成像的数据,确实存在一些插值和自动对焦变焦的问题。之后我做手机拍摄测试就一直的手工曝光、锁定焦距的方式。我从淘宝买过许多泡沫球来制作标记,可以看这个:
-
好的,多谢!
-
-
-
-

NewVFX的运行速度比2024年提升了11倍,负载能力提升了5倍,在安全方面首次使用了实时AI自动化拦截,自动化编写规则,效率与精准程度都得到提升。同时AI已经全面接入站点内核,2月份已经开始对站内内容进行学习与RAG构建,会在基础测试完成后开放使用。NewVFX构建的AI系统已经在多个领域投入实践使用,紧跟时代、我们一直在努力。
-

-
感谢你的提醒,现在已经进行了修正。祝您愉快~~
-
-
Ai的发展给更多行业带来了便利,但如何应用到实际工作中成为生产力的一部分也是我一直在思考的问题。通过在api以及本地部署模型,进行前端调用,以及RAG知识库构建、通过大模型训练精微模型,每一种方式我都尝试过。在这个过程中也搜集了一些有用的站点。将这些记录在这里,以后还会继续更新。
1. 本地部署大模型(LLM)
选择合适的模型:选择适合需求的 LLM
使用Ollama和LM Studio部署各大产商开源模型的流程
[five]
Ollama[/five]
-
老师这是我的操作步骤您看看有什么问题。看了您之前的视频,每个场景,在解算任何物体运动之前,都需要一个摄像机,①所以我先使用user track来标记了地面上的点来解算相机,②又因为想得到以固定参照点(比如斑马线端点)为原点的坐标系,我又以orient scene建立了坐标系,③继续添加user track来追踪目标车辆,并且采用user track节点中的export来导出txt坐标。综上所示:TXT追踪点坐标能导出来但是我发现我建立的坐标系对车辆跟踪点的坐标没有影响,车辆跟踪点还是以图片左下角为原点。老师辛苦您看我哪一步出了问题。
-
感谢大佬回复!我的摄像机是完全不动的状态,所以我只需要导出选择的物体即可,但是我不会导,还请大佬明示,您发的相关的帖子我都看了学习了,但是get不到那个点
-
是可以追踪定机位的,技术流程请参考这一篇:
如果在反求镜头追踪的同时,还需要追踪车辆轨迹,可以使用复合追踪流程:
另外不管是PFtrack还是3DEqualizer都可以导出选择的物体为坐标数据,TXT文本。我以前用这个方法交换不同软件的追踪数据。但是要注意,不同软件的位置标记记录算法比例可能不同。
-
各位大佬好,我用无人机拍了一些俯视的交叉口车流图,等同于二维平面视频,可不可以用PFtrack实现车辆像素轨迹的提取呢,就是以txt的格式导出车辆的位置信息呢,在usertrack下我可以导出一部分,但是3d坐标系建到二维平面非常不精准,请问如何把我的无人机俯拍视频中的车辆只识别2D轨迹并导出呢?
- 查看更多
