Activity
表里如一,知行合一,能量因此觉醒

-
是的,关键是把教程弄明白,学到东西才是靠谱的,你可以把调节好的东西发上来分享下,有好的教程也可以分享出来,或者翻译过来共享。毕竟达芬奇系统也是老外的,电脑、cpu,都是老外大神造的东西。关键是自己学好了,掌握了。
可以把学完教程(不管是哪种,谁的)学到的东西做成作品发布上来,大家共同学习。理论与结果都是非常必要的! -
太棒啦!!!
-

石佬 发了新动态 6年, 10个月 前
多谢分享
-

第五步、调整VR全景视频的水平线,使其看起来平整对齐。
大多时候,解算完毕的相机,CaraVR不会自动将图像放置在正确的方向,需要手工调整位置才能使地平线正确。
CaraVR提供了两种对齐水平线的方法:“ Setting(设置)”选项卡上的“ Transform(变换)”控件和“Viewer(查看器)”左上角的工具栏。
•转换控件:打开“C_CameraSolver属性”面板,单击“Setting(设置)”选项卡。调整的x, y和 z,使摄像机在框架中间或画面中间对齐为水平线。
•查看器工具栏:启用 Horizon工具,然后按住 Ctrl / Cmd + Alt并在Viewer中拖动以调整水平线。
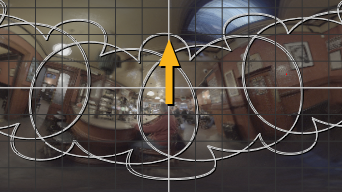

提示: 可以通过选择相机工具来以这种方式调整单个相机。
-
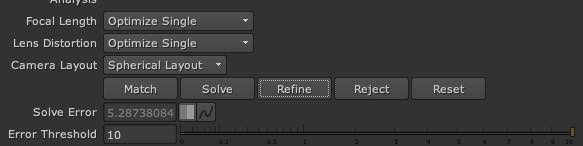
第四步、检测解算结果,并对解算结果进行优化。
在查看器工具中切换到摄像机模式(
 )显示叠加,会显示重叠摄像机特征点以及求解它们计算的RMS(均方根)误差。
)显示叠加,会显示重叠摄像机特征点以及求解它们计算的RMS(均方根)误差。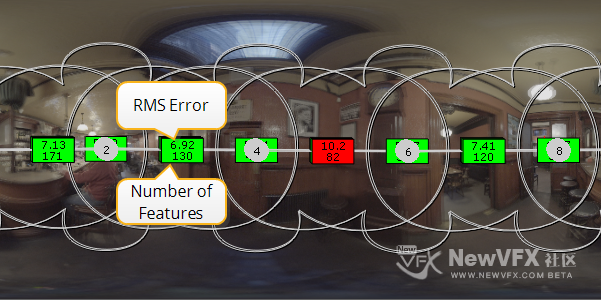
绿色叠加表示低于错误阈值的 RMS错误,红色覆盖超过阈值的红色叠加。
提示: 仅当播放头位于关键帧上时才会显示叠加层。
在该示例中,摄像机4和6的重叠内的匹配记录了10.2的RMS误差,这非常高。
1、通过属性面板对解算的摄影机参数做优化。
- 查看更多