回复于:【Nuke合成】使用CameraTracker解算摄像机位置(图文详解)
› VFX大学 › Nuke合成影视制作 › 【Nuke合成】使用CameraTracker解算摄像机位置(图文详解) › 回复于:【Nuke合成】使用CameraTracker解算摄像机位置(图文详解)
韩十七
二、排除解算故障
CameraTracker 中有一些排障工作流程,可以用来提高解算精度。不过这里十七还是要提醒大家,良好的解算结果还是取决于良好的跟踪数据。
——————
使用曲线阈值删除跟踪点
我们可以使用 AutoTracks 选项卡的阈值参数动态拒绝跟踪点,并移除它们,以提高精度。下面以 error – rms(均方根误差)给大家讲解下。
1. 点击属性面板的 AutoTracks 选项卡,并选中 error – rms 曲线。
小提示:我们可以按F键,将选中的曲线最大化地展示在坐标图中。
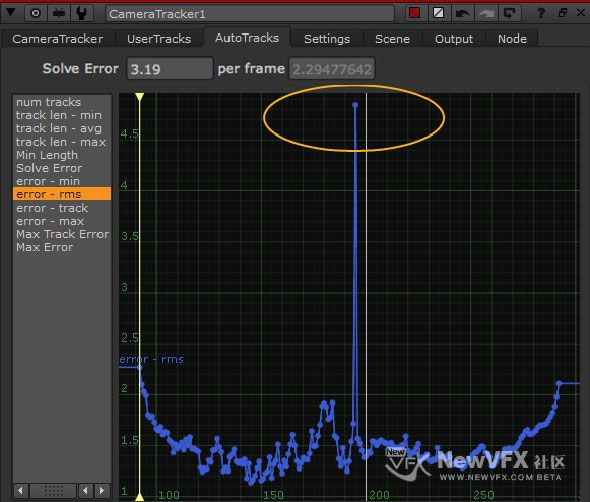
如上图所示,我们可以看到在第195帧附近,误差曲线有一个明显的上跳。
2. 将视窗播放头移动到受影响的区域,并检查视窗中已跟踪的特征点。
3. 降低属性面板中的 Max Track Error 参数,此时阈值之外的跟踪点会变成红色。
 Max Track Error 设置为6 |  Max Track Error 设置为2 |
4. 点击 Delete Rejected 移除所有指定阈值之外的跟踪点。
小提示:我们还可以手动移除跟踪点,在视窗中选中要删除的跟踪点,并右键,选择 tracks > delete selected。
5. 点击 Update Solve,重新解算受影响的帧范围。
6. 使用 Settings 选项卡的 Solving 参数进一步改善解算结果:
- Camera motion – 设置 CameraTracker 在求解解算过程中应考虑的摄像机运动。
- Keyframe Separation – 调整关键帧之间的分离值。
高分离值会产生较少的关键帧和较大的扩散,通常用于较慢的摄像机运动。
低分离值会产生较多的关键帧和较紧密的扩散,通常用于快速摄像机运动。
注意⚠️:启用此参数后,Reference Frame 参数将决定在哪里放置第一个关键帧。
- Smoothness – 较高的值有助于平滑摄像机路径。
- Reference Frame – 此参数可以指定更新摄像机解算的起始帧,以及确定放置第一个关键帧的位置。
注意⚠️:请勾选 Set reference frame 启用此参数。
——————
优化解算结果
在 AutoTracks 选项卡上,Refinement 选区,有三个优化参数可以帮我们改进解算结果。如果 CameraTracker 选项卡上的 Error 和 per frame 参数的值相对较高,可以尝试使用内围跟踪点优化解算结果。内围跟踪点由曲线阈值定义,还可以优化焦距、摄像机位置或摄像机旋转。我们可以先在 Output 选项卡上手动编辑摄像机解算,然后选择:
- Focal Length – 勾选此项以优化摄像机的焦距。
- Position – 勾选此项以优化摄像机位置。
- Rotation – 勾选此项以优化摄像机旋转。
最后,点击 Refine Solve。