回复于:【Nuke VR】使用CaraVR缝合修正全景视频、色彩匹配流程
› VFX大学 › Nuke合成影视制作 › 【Nuke VR】使用CaraVR缝合修正全景视频、色彩匹配流程 › 回复于:【Nuke VR】使用CaraVR缝合修正全景视频、色彩匹配流程
2019-05-28 - 10:52 #59091
蓝雨凌
参与者
第四步、检测解算结果,并对解算结果进行优化。
在查看器工具中切换到摄像机模式(![]() )显示叠加,会显示重叠摄像机特征点以及求解它们计算的RMS(均方根)误差。
)显示叠加,会显示重叠摄像机特征点以及求解它们计算的RMS(均方根)误差。
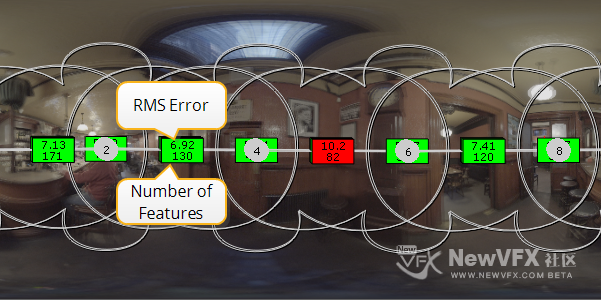
绿色叠加表示低于错误阈值的 RMS错误,红色覆盖超过阈值的红色叠加。
提示: 仅当播放头位于关键帧上时才会显示叠加层。
在该示例中,摄像机4和6的重叠内的匹配记录了10.2的RMS误差,这非常高。
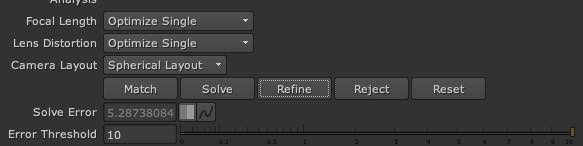
1、通过属性面板对解算的摄影机参数做优化。
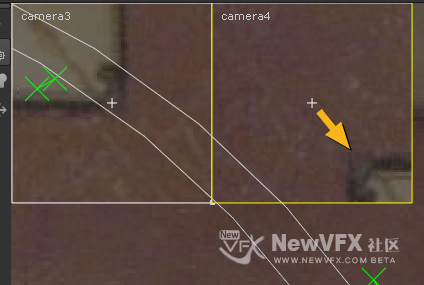
2、添加用户匹配
用户匹配是手动放置,而不是由C_CameraSolver自动检测,可用于改进自动匹配。您可以根据需要添加任意数量的用户匹配项。
1。 在Viewer工具中切换到添加匹配模式(![]() )。
)。
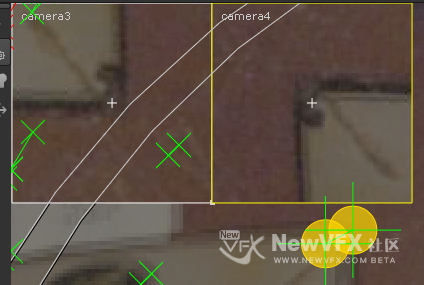
2。 按住Ctrl / Cmd + Alt并单击查看器中存在于多个摄像头中的功能以添加匹配标记(![]() )。
)。
3、将特征点重新手工拖动到正确匹配的位置。
 |  |