【3DEqualizer教程】如何使用几何模型反求摄像机轨迹?(视频详解)
› 社区话题 › 📽️PFtrack,3DEqualizer,Mocha追踪 › 【3DEqualizer教程】如何使用几何模型反求摄像机轨迹?(视频详解)
标签: 3DEqualizer, Lineup, 摄像机反求

- 作者帖子
- 2018-01-22 - 19:09 #31847

追光参与者V友们晚上好🌃我是追光,今天教大家在 3DEqualizer 中,使用几何模型反求摄像机轨迹。类似的 PFTrack 教程追光之前也讲过,所以 PFTrack 选手可以这边走:
在今天的教程中,我们的会使用一个简易的几何体模型,与画面对位,然后估算/反求摄像机轨迹。
和 PFTrack 还是有所不同,3DEqualizer 更注重原理,今天我们主要是在 Lineup 工作区工作,会涉及到一些曲线编辑器知识。主要的工作流程是:1. 导入素材和几何体模型;2. 一些对位前的准备;3. 将画面和几何模型对位;4. 调整摄像机位置曲线,得到摄像机轨迹;5. 跟踪对位点进行精准对位。
练习素材下载链接:
一、导入素材和几何模型
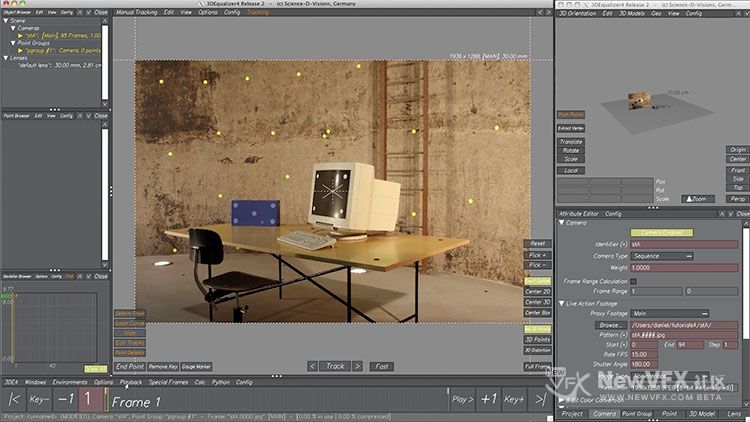
首先我们导入素材。点击 Camera 属性编辑器中的 Live Action Footage > Browse…,打开文件浏览器,选择跟踪素材。然后使用底部菜单 Playback > Export Buffer Compression File…,导出缓存,这样我们工作时播放素材不会卡。
 00:17
00:17导出缓存后,播放一遍素材,检查一遍。
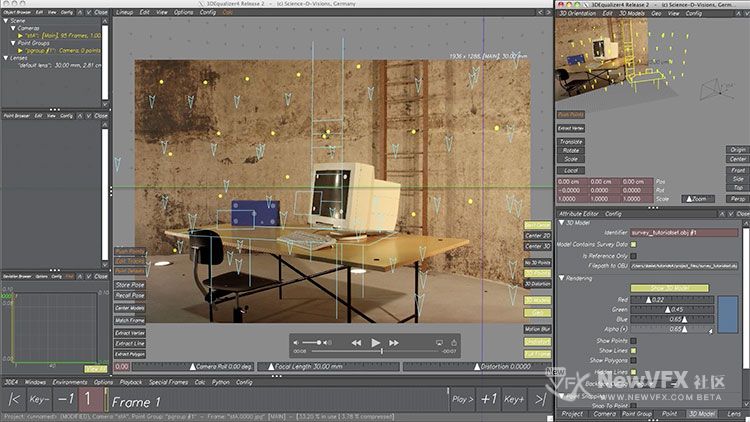
然后导入几何模型,按 F5 切换到 Lineup 界面,选择摄像机点组,右键 > Add New > Import Obj File…,导入几何体。点击画面左侧的 Center Models,将模型显示在画面中央。
 00:13
00:13二、对位前的准备
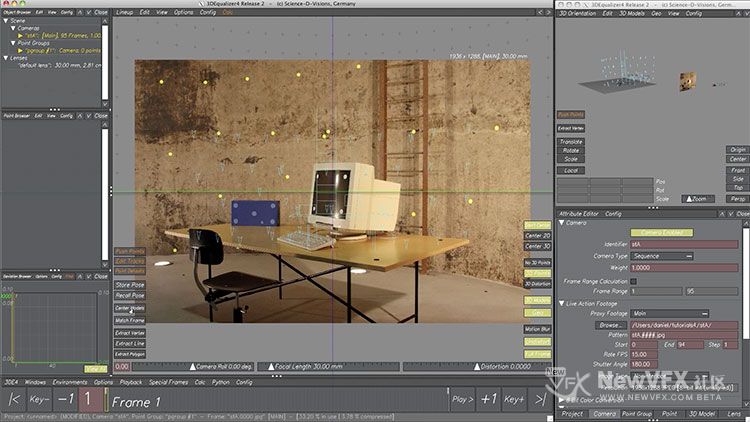
此时3D空间中有一个静止的摄像机,这个摄像机拍摄的是几何模型。当我们操作画面中的模型时,摄像机也会相应地改变位置。这里我们把摄像机放大一些。
 00:07
00:07然后设置一下几何体的显示属性,使其更适合我们后续的工作。
 00:15
00:15设置一下底片尺寸,这很重要。
 00:07
00:07三、将画面和几何模型对位
在这个步骤中,我们需要在第一帧、最后一帧,和一些中间帧,将模型和画面对齐,然后利用这些关键帧,为摄像机位置生成插值。
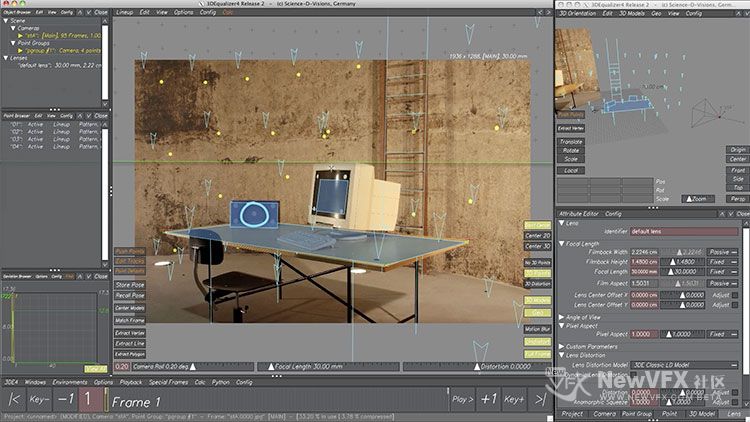
对位第一帧
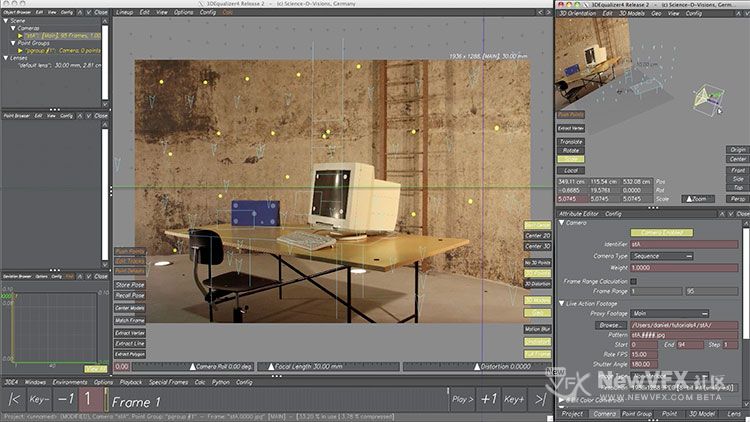
在 Lineup 界面,回到第一帧,将模型和画面对齐。
按 V 键,提取模型顶点,然后按 Ctrl 创建一个点,这样模型顶点和新创建的点是重合的,然后将这个点拖到桌子的脚上。
如法炮制,将画面中的其他边、角对齐。
——————
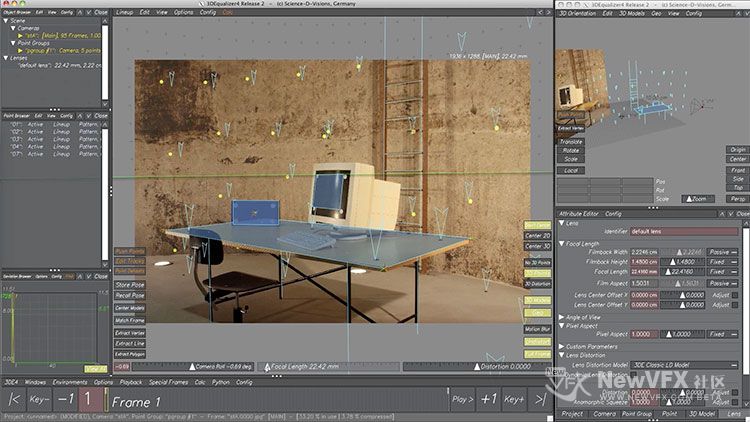
校正摄像机焦距
使用画面下方的 Focal Length 进行焦距微调,或者使用属性面板中的焦距,做大幅度的调整。
 00:29
00:29——————
校正镜头畸变
然后使用焦距旁边的 Distortion 校正镜头畸变。这里我们选择的参考线是梯子右边内侧的线,当模型和这条线重合时,则校正准确。
 00:11
00:11此时摄像机和镜头参数就校正完成了。
这是模型和画面完全重合,我们点击左侧的 Store Pose,将这个状态存储起来。
——————
对位最后一帧和中间帧
由于是插值计算,在本案例中,第一帧和最后一帧是必须对位的。使用前面的方法,对最后一帧对位。
 00:18
00:18此时我们得到一条平直的摄像机运动轨迹,这显然不是我们想要的。因此我们再对位两个中间帧。方法和上面一样,这里就不演示了。
四、调整摄像机曲线
对位好四个画面后,我们调出曲线编辑器面板,选中所有的点,进行平滑处理。
 00:28
00:28在 3D 空间中我们可以看到一个平滑的弧形轨迹,和摄像机的运动轨迹基本重合。
但是当我们播放画面的时候,发现模型和画面并不完全重合,这说明我们反求的轨迹不够精确。当然,我们还可以继续多对位一些画面,然后平滑处理,进一步优化摄像机轨迹。
不过下面追光要讲一种更快更精准的方法。
五、跟踪对位点进行精准定位
我们在 3D 空间的模型上有点,在平面空间也可以创建点,将 3D 的点和 2D 的点关联起来,求出来的摄像机轨迹会比手动对位更精准。
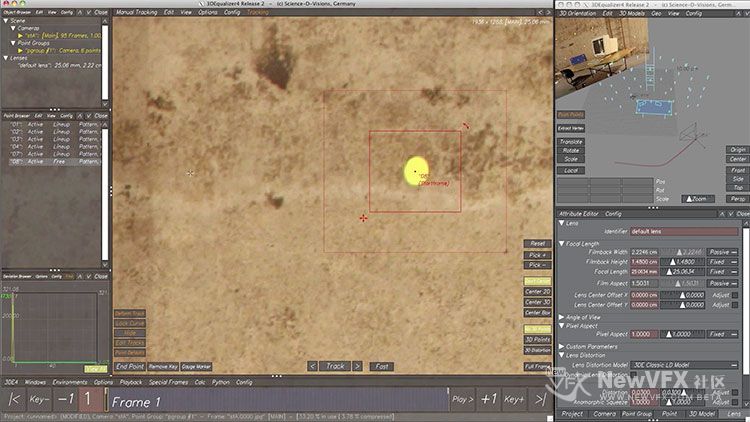
跟踪并关联第一个跟踪点
按 F2 键回到手动跟踪界面,选中墙上的一个点(要确保这个点在几何模型上有对应的点),添加跟踪点,将跟踪模式改为 Marker,进行跟踪。
 00:20
00:20跟踪完成后,回到 Lineup 界面,按 V 提取模型上的点,再点击跟踪好的点,将两个点关联起来。
——————
跟踪并关联剩下的跟踪点
因为之前我们在对位的时候已经创建了一些点,所以这时我们只需要把点的测量类型改为 Exactly Surveyed,精确测量就可以,再进行跟踪,就可以了。不必新创建点。
下面是盒子中心的点。
 00:37
00:37下面是墙上的一个标记点的跟踪过程。
 00:22
00:22——————
将跟踪点与摄像机路径匹配
回到 Lineup 节点,在画面的第一帧,点击左侧的 Match Frame,将第一帧的跟踪数据和摄像机轨迹相匹配。往后拖几帧,继续点击 Match Frame 进行匹配。这样哪一帧不对,我们就可以手动修正那一帧。
 00:13
00:13当然,我么也可以使用 Match Frame All 命令,匹配所有帧。
 00:12
00:12至此,我们就得到了一个很精准的摄像机轨迹。
可以播放一下画面,检查一下反求结果。
 00:08
00:08完美!
如有疑问,可以跟帖留言,追光会尽快回复噢。
如果喜欢追光的帖子,点击我的头像,加我为好友,就可以看到我得更新啦,也可给我发私信,点击帖子顶部得收藏放入收藏夹,方便将来再次查看~
本帖未经允许不得转载,禁止二次转载,未经书面授权严禁转载,谢谢!
- 2018-01-22 - 22:43 #31907

VFX小布丁参与者百度了一下,找到些碎碎的文字来描述这个软件的,话说这个流程是连接实拍镜头与三维模型,游戏领域的桥梁,如此高端的制作方法,全网都找不到,在这里却如此详实,细致,而又如此精致,抽空一定要学习下这个软件,就为了做高端片子必备 这句话
- 2019-09-18 - 18:38 #68137
追光参与者在此基础上使用手工追踪反求出的摄影机🎥与场景进行对位流程补充:
3DEqualizer 使用脚本 Transform to Poses进行场景对位流程:
第一步、在Mannual(手工追踪)界面对点进行追踪后并进行摄影机反求,对画面进行畸变校正,并对焦段进行反求。
第二步、切换到Line up场景对位界面,并导入三维场景模型。(同上)
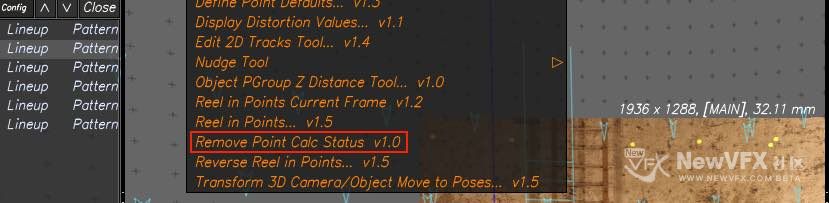
第三步、Center 3D model之后,消除关键帧链接对位追踪好的点,需要先清除点的关键帧信息:Edit–Remove Point Calcu Status移除之后,再进行摄像机缩放的动作对位。
第四步、回到本教程中的将场景与三维模型对位,之后存储pose。
第五步、对摄像机进行重新解算(Cacul all from Scratch)之后,使用菜单: Edit—>> Transfer 3D Camera/Object Move to poses…,就得到整个场景匹配的结果啦~~

最终提示:如果想进一步优化追踪结果,可以在第一帧,最后一帧,中间帧添加对位的pose,之后执行Edit—>> Transfer 3D Camera/Object Move to poses…即可快速得到精准的摄影机移动轨迹,场景精确对位结果。
本教程将手工场景对位,使用追踪点进行对位,使用摄影机反求与场景对位三种方法都总结出来了,如有疑问,可以跟帖留言,追光会尽快回复噢。
如果喜欢追光的帖子,点击我的头像,加我为好友,就可以看到我得更新啦,也可给我发私信,点击帖子顶部得收藏放入收藏夹,方便将来再次查看~
本帖未经允许不得转载,禁止二次转载,转载请注明出处并保留在本站的完整链接,谢谢!
- 2020-02-12 - 14:33 #71243

摘叶茶参与者下载的素材不对呀,显示不全桌面呀?
- 2020-02-12 - 16:46 #71244
摘叶茶参与者大大,还有就是如和设置两个视窗?
- 2022-07-15 - 10:37 #87843
下载的素材与教程不对啊
- 2022-07-18 - 15:38 #87860
追光大大,刚看了素材还是3DE_move_zoom这个压缩包,与你上面讲的案例素材还是不一致,另外的链接里面是pan和ref_frames以及模型,麻烦看一下。
- 2022-07-18 - 15:57 #87861
追光参与者案例中用到的素材有:
1、Pan旋转镜头拍摄的场景素材,这里是用模型来匹配到场景,通过”pose“反向求解摄影机。
2、Ref素材:是从多个角度拍摄的同一个场景,可以通过多个角度的单帧在3de或PFtrack中解算出场景的模型距离。
模型素材是使用3DE通过Ref素材计算生成的模型,如果不想学习摄影测量可以跳过素材2、直接使用素材3.
3、是通过Ref素材求解后生成的模型,是ref的结果。
另外此模型匹配空间的方法与素材可以应用于所有相同场景的反求,包括:zoom、Pan、move等镜头运动类型,但需要是同一个场景,操作方法类似,但对于对位关键帧的pose需要的参考点,需要多综合几个画面交集点。
- 2025-09-19 - 15:36 #130776
never.&参与者这样的用模型反求相机轨迹的这种方法一般是什么情况可以运用
- 2025-09-19 - 20:00 #130778
追光参与者1、追踪运动物体,比如手里拿个易拉罐或者其他物体在动,要追踪这个易拉罐的运动轨迹,这时候我们就可以用一个圆柱体的三维模型来匹配进行反向追踪。
2、上方的案例中是将场景中主要环境进行了简单建模,然后拿这个基础模型来对位实际拍摄的场景,进行反求。这样做其实是另外一个追踪思路。并不是我们常规的用特征点来计算场景,而是反过来,用重建的三维空间来对位真实拍摄到的空间进行反求。
这涉及到VFX制作中的流程问题了,要根据各个项目协作的状况来设计哪种追踪方式效果最好 还有效率最高,需要考虑到周围一起制作项目的人的习惯和方式。当然掌握各种追踪方式是非常有必要的,因为非常有意思,这些技术事实上是军用技术的非实时版。定位三维空间中的物体,其实就是雷达和定位的技术。比如定位飞机的坐标然后~~,所以3DEqualizer还有导入雷达数据的功能,也和这个使用模型反求类似。
- 作者帖子

- 在下方一键注册,登录后就可以回复啦。