【PFTrack教程】如何使用自动跟踪和摄像机解算?(视频详解)
› 社区话题 › 📽️PFtrack,3DEqualizer,Mocha追踪 › 【PFTrack教程】如何使用自动跟踪和摄像机解算?(视频详解)

- 作者帖子
- 2018-01-07 - 08:16 #30912

追光参与者在本次教程中,我们将学习如何解算摄像机运动,然后测试得到的场景,最后导出场景。我们会使用自动跟踪来生成跟踪点。
练习素材下载链接:
1. 设置项目
 00:12
00:12关于 PFTrack 的入门知识可以参考这个帖子:
2. 跟踪素材
拿到跟踪任务,永远的第一步是播放素材,估计素材的难度,考虑用什么样的方法更合适。素材是一个教堂⛪️的手持镜头。
 00:09
00:09检查完以后,确保 Clip 节点是选中的,然后创建 Auto Node 节点,可以点击 Create 按钮然后点击 Auto Track 创建,也可以右键 Clip Input 节点选择 Auto Track。
新节点应该是自动连接的。如果没有,请手动连接。
 00:04
00:04Auto Track 节点会自动生成候选跟踪器,并在整个片段中进行跟踪,我们可以设置节点参数,来控制跟踪。
这里不一一解释节点的参数了,大家可以点击 Help 按钮查看帮助文档。
这里调节两组参数:Search mode 和 Deformation。
 00:06
00:06搜索模式菜单可以选择跟踪算法:Better Speed,Better Accuracy 和 Optical Flow(更快,更准,光流)。由于手持镜头的特性,而且在有些帧中有运动模糊,这里我们选择 Optical Flow。
 00:07
00:07我们还应该更改变形设置。这指定跟踪图案随时间如何变形。这里将 Rotate、Scale 和 Skew 都启用,跟踪窗口就可以扭曲和变形了,这样可以更好的匹配参考团,增加跟踪器的生命长度。
点击 Auto Track 开始跟踪。现在我们就可以看到 PFTrack 是如何拾取特征点并跟踪它们的。在这个过程中,我们可能会发现一些跟踪问题。
如果按住 Shift 点击 Auto Track 按钮,自动跟踪就会在后台运行,这样我们可以同时处理另一个片段。
我们将看到 PFTrack 执行两个跟踪过程,先向前,再向后。在第二个过程中,PFTrack 不会再创建新的跟踪点,但是这样可以增加已存在的跟踪点的长度。根据经验,长时间存在的跟踪点通常对摄像机解算最有利。
 00:11
00:11跟踪完成后,我们可以播放素材,检查跟踪。所有的特征点都应该跟踪得很准确。
3. 解算摄像机
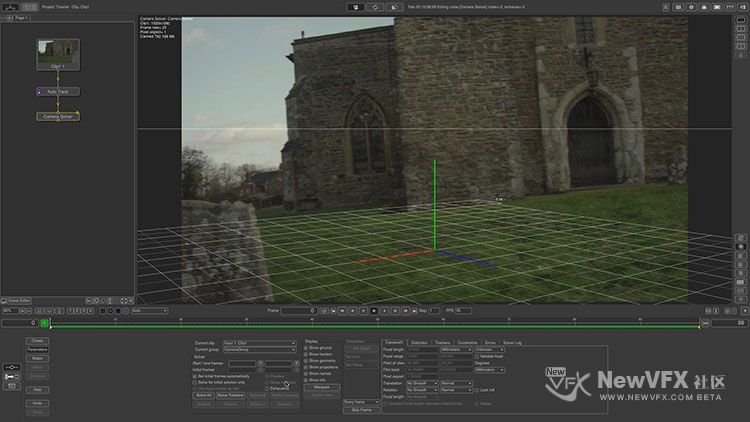 00:05
00:05接下来我们使用 Camera Solver 节点将跟踪点转化为摄像机运动。点击 Create,然后点击 Camera Solver 按钮创建节点。
 00:10
00:10和 Auto Track 节点一样,有许多参数可以影响 Camera Solver 的工作。参数详解可以翻看帮助文档,这里暂不详解。
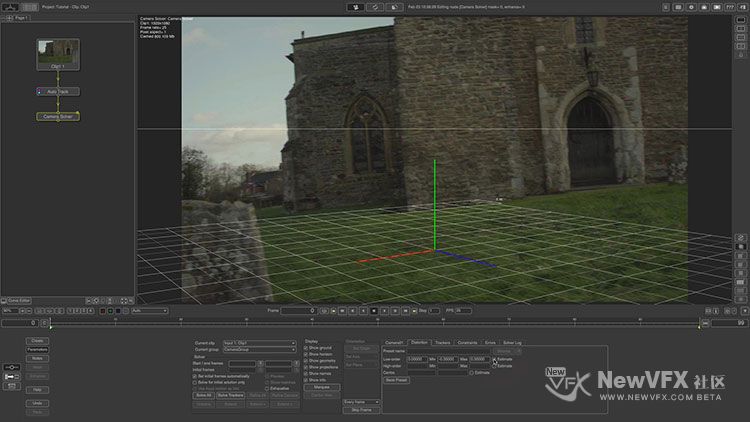 00:03
00:03另一个需要计算的是镜头畸变,我们可以打开 Distortion 选项卡,勾选 Low-order 和 High-order 镜头畸变的 Estimate,在解算时自动估算镜头畸变。
其他参数暂时保持默认即可,点击 Solver All 开始摄像机解算。
PFTrack 现在会做一些数字运算,将跟踪点运动转化为摄像机运动。
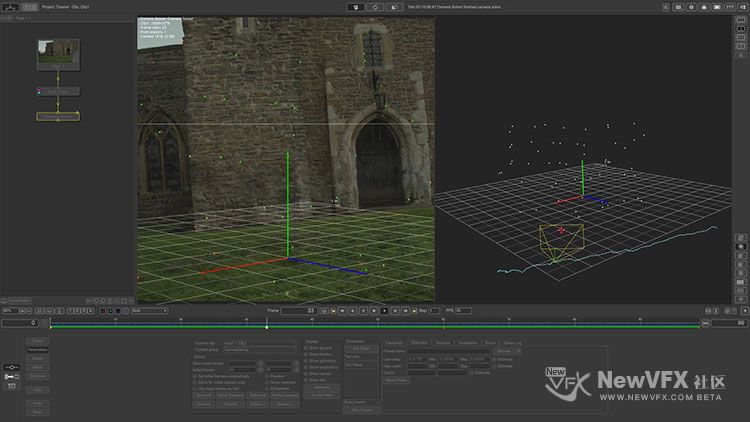 00:10
00:10完成后,我们可以在透视图中检查解算结果。
4. 定位场景
 00:05
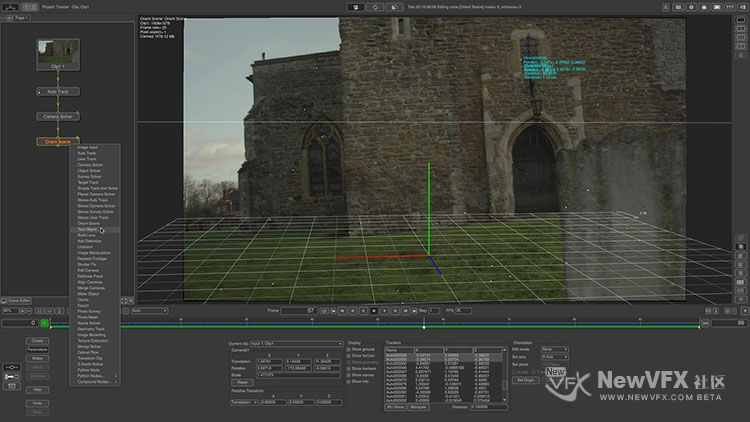
00:05右键 Camera Solver 节点,选择 Orient Scene,创建 Orient Scene 节点。
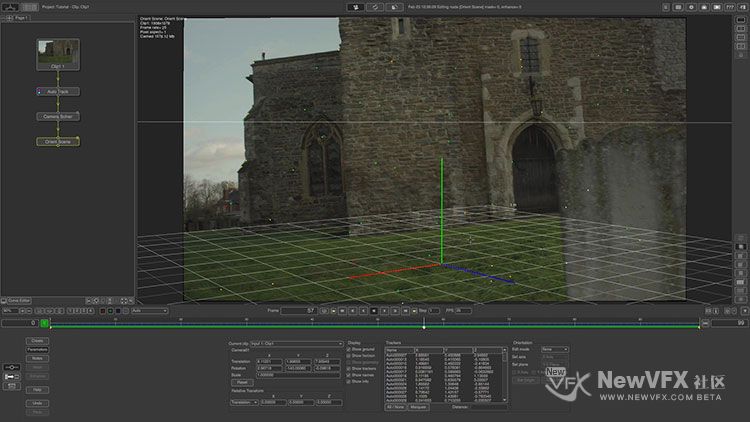 00:06
00:06我们先关闭透视图。选择一个跟踪点,点击 Set Origin 定义场景原点。
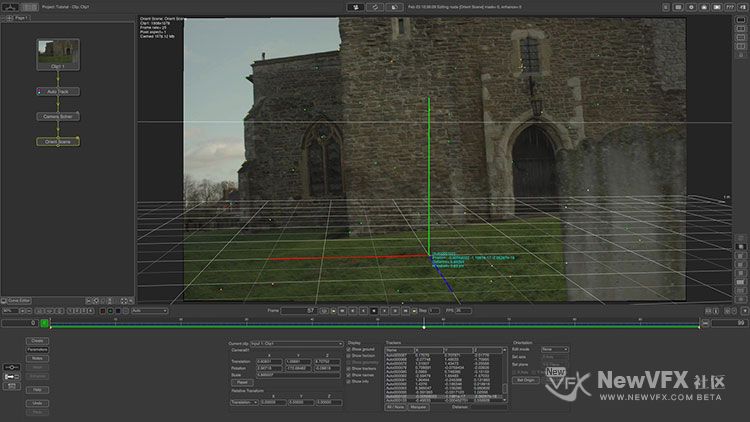
 00:20
00:20我们可以使用 Edit mode 更改场景的整体位置。在 Rotate 模式下,我们可以使用 Cinema 中的操控器旋转地面,Translate 和 Scale 也同理。选择 None 可以再次隐藏操控器。
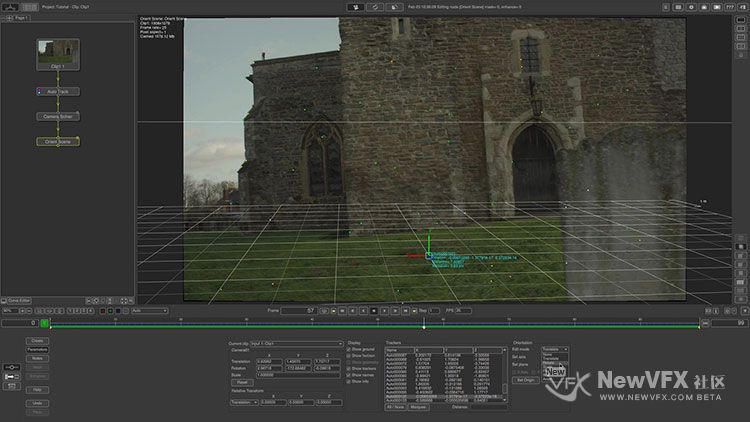
 00:12
00:12我们还可以通过定义两个跟踪点之间的距离来缩放场景。比如,选择两个点,按住 Command/Ctrl 可以多选。如果这两个点之间是15厘米,那么我们就可以在 Distance 编辑框中输入 0.15,场景也会相应地缩放。
场景定位完成后,我们需要测试一下解算结果,再导出。
5. 测试解算结果
 00:04
00:04在 Camera Solver 节点下方创建 Test Object 节点。
Test Object 节点可以在场景中添加几何体,测试解算质量。
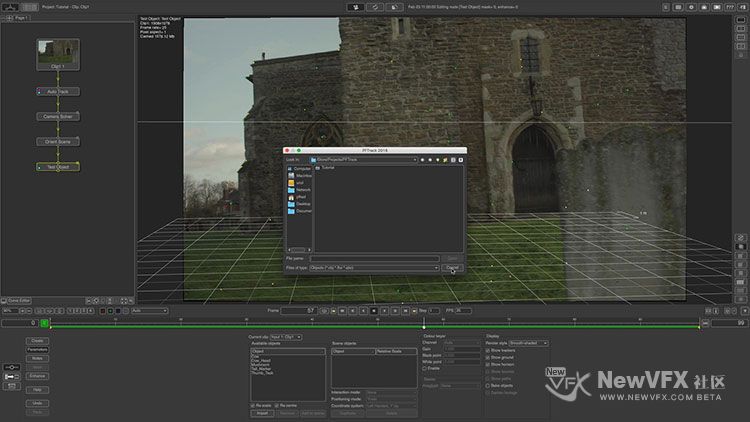 00:08
00:08节点中有一些预置几何体,我们也可以导入自己的几何体,支持 obj、fbx 或 alembic 格式。双击 Caw 向场景中添加一个奶牛。
 00:14
00:14使用 Interaction 交互模式定位菜单,和上面 Orinet Scene 节点中的 Edit 模式使用方法一样,有 Translate、Rotate 和 Scale 操控器。这里我们使用 Place at selected feature,点击任意特征点,将测试物体放在该特征点上。
播放场景,几何体奶牛应该站在草地上,原地不动,就像它是原地的一部分。
 00:12
00:12我们再多加一些测试物体,比如蘑菇🍄。
 00:05
00:05在 Test Object 节点的 Display 部分,关闭 Show trackers、Show ground 和 Show horizon,隐藏跟踪点、地面和地平线,只显示原始素材和测试物体。
来回播放检查一遍,如果没有问题就可以导出了。
6. 导出解算结果
 00:09
00:09创建 Export 节点。该节点可以将我们的解算结果导出给第三方应用。大多数可用导出是完全自定义的 Python 脚本,所以很容易添加我们自己的文件格式(如果需要的话)。
 00:11
00:11我们可以使用下面这些选项卡导出我们想要的文件格式和内容。

在我们的场景中,Cameras 选项卡中有一个摄像机,Groups 选项卡又一个默认的摄像机组,Trackers 选项卡有所有的跟踪点,Objcets 选项卡有测试物体。
Object 选项卡中没有勾选蘑菇,所以导出场景中不包括它们。要确保导出 Filename 和 path (文件名和路径)正确,然后点击 Export Scene。
好了,本次教程就到这里了,希望大家做完后暂时不要删除项目,以后的教程中还会用到的。谢谢啦~希望大家学有所获。
- 2018-01-07 - 08:21 #30915
追光参与者如有疑问,可以跟帖留言,追光会尽快回复噢。
如果喜欢追光的帖子,点击我的头像,加我为好友,就可以看到我得更新啦,也可给我发私信,点击帖子顶部得收藏放入收藏夹,方便将来再次查看~
本帖未经允许不得转载,禁止二次转载,转载请注明出处并保留在本站的完整链接,谢谢^_^
- 2018-01-07 - 12:35 #30922

恬的卫士管理员太详细了,如果用心点,真可以一步步照做着走,很棒,👍
- 2018-01-07 - 20:43 #30957

橘子茜茜参与者把视频都看了一遍 有点似懂非懂滴感觉 这个软件是用来给拍摄好的视频 加入三维物体的吗? 让它看起来和拍摄的时候一样让人区分不出来?
- 2018-01-07 - 20:47 #30958
追光参与者是的,连接实拍镜头和三维场景的桥梁
- 2018-01-07 - 20:48 #30959
恬的卫士管理员看来你的反应还是挺快 居然把最核心的功能给看懂了。我也用这个软件并且在学习中,我大概讲解一下:
通俗来说这类软件的作用就是保证三维模型等虚拟元素“贴合”在有摄像机运动的视频画面中。电影中的实拍视频画面是由真实摄像机拍摄的,而三维动画的画面是三维软件中的虚拟摄像机“拍摄”的,“摄像机反求”就是通过视频画面求出真实摄像机的运动轨迹和镜头参数等,在三维空间里创建与之一致的虚拟摄像机。
摄像机反求:就是在后期制作的时候,根据特征点反求出前期摄像机的运动轨迹,这样在后期合成的时候,就可以放入制作好的三维模型,三维角色,三维动画等等元素,让画面看起来就像和前期拍摄的时候一样。其中知名的摄像机反求软件有 pftrack 3deguarlizer,boujou,syn等。
更多进阶了解,可以参考以下文章
- 2018-05-02 - 11:43 #36107
感谢版主,现在点击视频后显示:html5 video not found。
- 2018-11-06 - 11:34 #49954
忘晨参与者有个问题要请教一下,一个航拍视频要合成一栋楼进去,现在用pftrack追踪之后,导入到3DMAX里面,单位不对,只能是相机和关键点打包放缩,但是对的不准确,有没有更好的办法可以精确对位?
- 2018-11-06 - 12:21 #49955
追光参与者在追踪的时候我们可以预先加入参考点,还有预判断场景的距离:
1 首先要求追踪要精确,建议使用手动追踪,这样好确定方位。
2 关于单位,在反求出结果后,选择两个确定的点,选中并且输入一个预判的具体数字。(可以预判一下两点之间的距离,比如判断墙的高度是3m)
3 追踪好后 orient scene的时候 要尽量的水平,将场景旋转到坐标的 x y z 三个坐标中心的时候,可以对位到要放置大楼的位置。
4 旋转调整好场景后,在要放置大楼的位置找一个点,使用test object节点加上一个定位钉(tail)。导入三维软件后要注意下:
1 三维软件的默认单位,比如houdini,c4d 都是米(m)
2 将场景再次调整下对位到 三维软件中的 x y z的中心点。
3 不要缩放场景来做定点,因为摄像机的焦距,焦段所产生的变化,并不是我们缩放场景的距离大小,所以会导致:某一个时间能对位,别的时间错位。
4 导入场景后,除了对场景进行坐标中心点对位,调整楼到我们预先放置定位钉的位置或者,放到场景的中心点(如果在pftrack中我们是将中心点设置在了要放入大楼的位置的话)最后建议:
拍摄的时候,量一下主要拍摄物体的距离并记录一下。
追踪的时候尽可能使用手动追踪,这样我们可以追踪出确定的点,这些点的关键在于,可以勾勒出我们要的三维轮廓。(非常有用)
- 2018-11-06 - 15:13 #49963
忘晨参与者好的,谢谢,还有一个问题请教,PFtrack里面我设置的是25帧每秒,导入3D软件中怎么变成了30帧每秒,是PFtrack中设置出了什么问题吗
- 2018-11-06 - 15:17 #49964
忘晨参与者补充一点,frame rate 我输入了25,Film back我手动输入了24MM的焦距
- 2019-03-27 - 21:27 #55594

柠檬味的大西瓜参与者想问一下,导出的相机怎样导入nuke,或者Maya里边啊。
- 2020-02-07 - 15:31 #71199

摘叶茶参与者有个疑问就是Consistency项里的NOne Local motion free amera Rotation/planar的选择
- 作者帖子

- 在下方一键注册,登录后就可以回复啦。