3DEqualizer使用脚本 Transform to Poses进行场景摄影机对位流程
› VFX大学 › PFtrack,3DEqualizer,Mocha摄像机追踪 › 【3DEqualizer教程】如何使用几何模型反求摄像机轨迹?(视频详解) › 3DEqualizer使用脚本 Transform to Poses进行场景摄影机对位流程
追光
在此基础上使用手工追踪反求出的摄影机🎥与场景进行对位流程补充:
3DEqualizer 使用脚本 Transform to Poses进行场景对位流程:
第一步、在Mannual(手工追踪)界面对点进行追踪后并进行摄影机反求,对画面进行畸变校正,并对焦段进行反求。
第二步、切换到Line up场景对位界面,并导入三维场景模型。(同上)
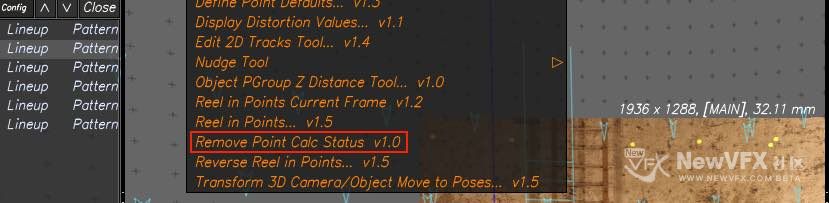
第三步、Center 3D model之后,消除关键帧链接对位追踪好的点,需要先清除点的关键帧信息:Edit–Remove Point Calcu Status移除之后,再进行摄像机缩放的动作对位。
第四步、回到本教程中的将场景与三维模型对位,之后存储pose。
第五步、对摄像机进行重新解算(Cacul all from Scratch)之后,使用菜单: Edit—>> Transfer 3D Camera/Object Move to poses…,就得到整个场景匹配的结果啦~~

最终提示:如果想进一步优化追踪结果,可以在第一帧,最后一帧,中间帧添加对位的pose,之后执行Edit—>> Transfer 3D Camera/Object Move to poses…即可快速得到精准的摄影机移动轨迹,场景精确对位结果。
本教程将手工场景对位,使用追踪点进行对位,使用摄影机反求与场景对位三种方法都总结出来了,如有疑问,可以跟帖留言,追光会尽快回复噢。
如果喜欢追光的帖子,点击我的头像,加我为好友,就可以看到我得更新啦,也可给我发私信,点击帖子顶部得收藏放入收藏夹,方便将来再次查看~
本帖未经允许不得转载,禁止二次转载,转载请注明出处并保留在本站的完整链接,谢谢!