回复于:【PFTrack教程】如何将多个摄像机解算到一个场景中?(gif图文详解)
› VFX大学 › PFtrack,3DEqualizer,Mocha摄像机追踪 › 【PFTrack教程】如何将多个摄像机解算到一个场景中?(gif图文详解) › 回复于:【PFTrack教程】如何将多个摄像机解算到一个场景中?(gif图文详解)
追光
2. 使用公共的跟踪点解算摄像机
我们首先跟踪的是两个视频片段。使用公共跟踪点将两个或以上摄像机解算到一个场景中,这种方法不需要任何额外的数据,并且只要每个片段中有足够的公共特征点就会一直工作。
——————
跟踪公共特征点
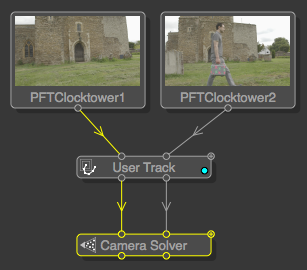
为了识别和跟踪多个片段中的公共特征点,这些片段必须连接到同一个 User Track 节点中。通过在所有片段中放置并跟踪对应的跟踪点,我们可以在节点中创建公共特征点。
下图显示了两个片段中一个合适的公共特征点。

练习素材中的 camera_trackers.txt 文件中包含多个跟踪点,有的是这两个片段的公共跟踪点,有的是每个片段中一些额外的独有跟踪点。
——————
解算摄像机
下面,所有的 User Track 节点的输出都连接到一个 Camera Solver 节点上了。
在 Camera Solver 节点中,点击 Solve All,同时解算两个摄像机。我们可以在解算前分别调节每个摄像机的解算参数。
解算完成后,我们可以在 3D 视图中检查这两个摄像机的运动。
![]()
——————
解算后
解算好的场景可以由节点树传递下来,比如流入 Orient Scene、Test Object 和 Export 节点。Camera Solver 节点的每个输出都代表一个摄像机,所以我们需要把所有的输出都连接到下一个节点,这一点对那些可能更改坐标系的节点尤其重要,比如 Orient Scene 节点。
所有的摄像机都可以统一导出到一个 3D 场景文件中,当然,也可以单独导出。