PFTrack摄影测量-解算移动摄像机
› VFX大学 › PFtrack,3DEqualizer,Mocha摄像机追踪 › 【PFTrack教程】如何使用Photogrammetry摄影测量(图文详解) › PFTrack摄影测量-解算移动摄像机
2018-01-03 - 10:49 #30452
追光
参与者
5. 解算移动摄像机

接下来我们使用 Scene solver 节点跟踪移动摄像机,并解算到创建的场景中。选择 Orient Scene 节点,然后右键选择 Scene Solver。
测量照片和点云应该连接到节点的第一个输入上。在将移动片段跟踪到场景中时,我们需要点击 Initialize 初始化点云数据。
此操作每个 Scene Solver 节点只能做一次,完成后,此祭奠可以用于跟踪和解算几乎无限数量的摄像机到场景中。

然后将视频片段连接到第二个输入端。
并在 Current clip 菜单中选择 PFTChurch1。
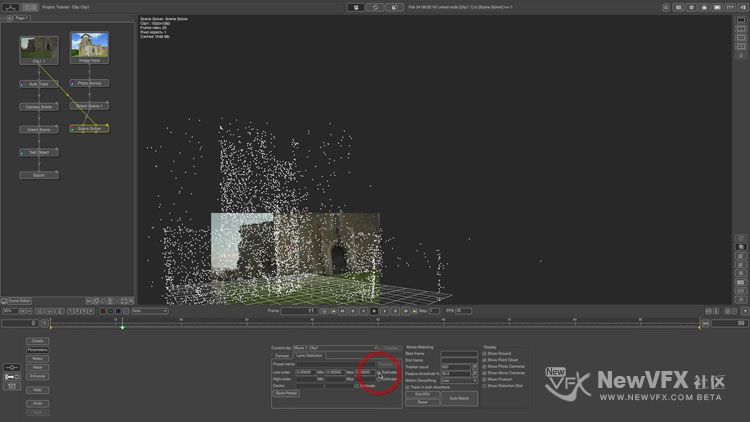
和之前生成点云的时候一样,开启镜头畸变估计。在 Lens Distortion 选项卡上,为 Low-order 镜头畸变勾选 Estimate。
然后点击 Auto Match。
此时 PFTrack 开始跟踪贯穿整个镜头的特征点,和 Auto Track 节点一样,勾选 Track in both directions 以增加平均特征长度。完成跟踪后,PFTrack 会自动进行下一步处理——解算摄像机运动,并将运动的摄像机对齐到场景中。
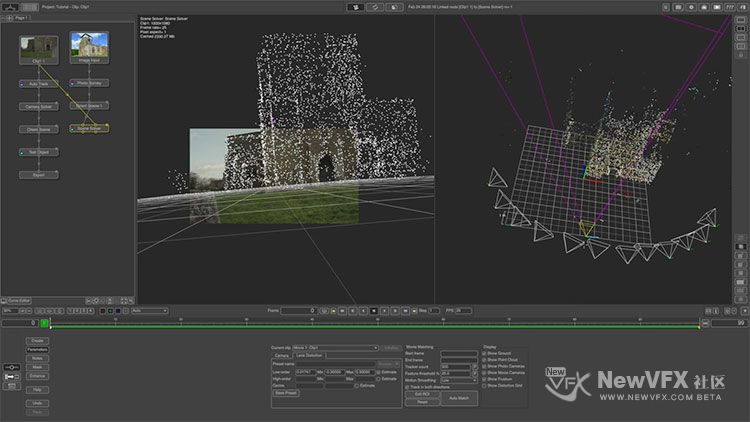
这一步完成后,我们可以在透视视窗中查看解算结果,这时我们会看到运动摄像机已经和静止摄像机和点云一起嵌入到场景中。