PFTrack摄影测量-特征点匹配
› VFX大学 › PFtrack,3DEqualizer,Mocha摄像机追踪 › 【PFTrack教程】如何使用Photogrammetry摄影测量(图文详解) › PFTrack摄影测量-特征点匹配
2018-01-03 - 10:28 #30450
追光
参与者
3. Photo Survey(图片测量)
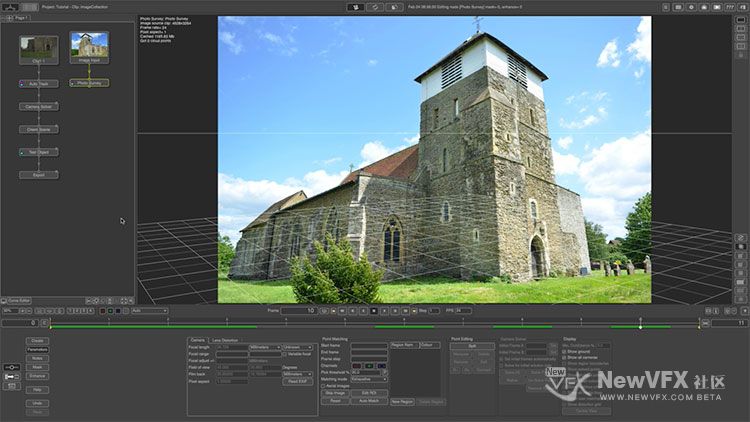
现在我们要使用 Photo Survey 节点从静帧中生成测量数据点云。右键 Image Input 节点,从菜单中选择 Photo Survey。

点击 Read EXIF,从图像文件中读取 EXIF 数据。预览 EXIF 数据,然后点击 Accept。此时会弹出一个对话框,询问是否允许稍微偏离报告的焦距,注释也说得很清楚,这样可以提高解算精度,所以点击 Yes 确认。
Feature Matching 特征点匹配
接下来是本帖最关键的操作。
点击 Auto Match 开始生成数据。
在生成测量数据的过程中,PFTrack 会浏览所有的图像,以识别多个图像中共有的特征点。在匹配过程中,识别的特征点会在 Cinema 以黄色十字架出现。

数据生成后,我们可以检查匹配点,在 Cinema 中选择一个特征点,播放条上的标记会识别包含该特征点的其他图像。

我们可以跳到这些图像上查看匹配。

接下来我们将这些特征点匹配转换为3D数据,此时需要我们启用自动估计镜头畸变,得到更精确的摄像机位置估算和3D点云。
在 Lens Distortion 选项卡上,将 Low-order 和 High-order 镜头畸变的 Estimate 都激活。
然后选择 Solve All,生成点云,并计算每个图像的摄像机位置。
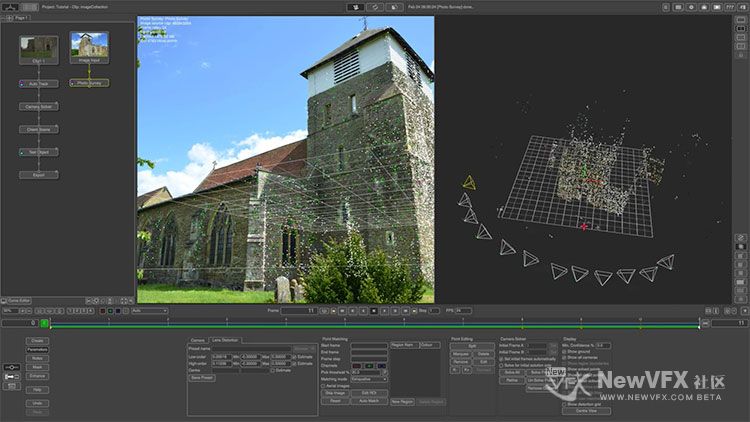
完成后,我们会得到一个3D场景,在透视视窗中可以查看。在点云中很容易看出教堂的形状,我们可以可以看到拍摄照片的位置。