PFTrack 2017 人工智能图像识别追踪匹配新功能(中英文)
› 社区话题 › 📽️PFtrack,3DEqualizer,Mocha追踪 › PFTrack 2017 人工智能图像识别追踪匹配新功能(中英文)
标签: PFtrack, PFTrack 2017, PFTrack更新
- 该话题包含 0 个回复、1 个参与人,并且最后由
 追光 于 8年, 11个月 前 更新。
追光 于 8年, 11个月 前 更新。
- 作者帖子
- 2017-04-08 - 11:02 #18842

追光参与者收集翻译对照整理:北京奴那斯文化传媒测试:Nunasi VFX 追踪匹配
奴那斯传媒独家PFtrack 节点文档翻译:PFtrack文档
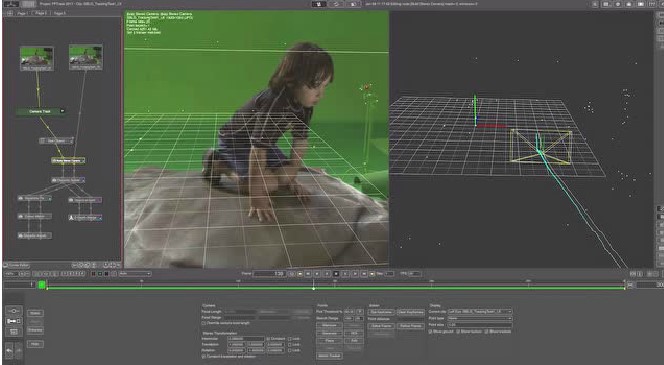
It’s here! PFTrack 2017 is possibly our biggest upgrade since the introduction of the highly acclaimed node tree in 2011. Integrating PFDepth has allowed us to create a groundbreaking next generation of PFTrack unrivalled by any other app on features, functionality and outright innovation.
PFTrack 2017可能是自2011年推出备受好评的节点树以来最大的升级。集成PFDepth使我们能够创建一个突破性的下一代PFTrack,无与伦比的任何其他应用程序的功能,功能和彻底的创新。
So What’s New?
All functionality of PFDepth embedded in PFTrack
PFDepth的所有功能嵌入PFTrack
User Interface Updates and Productivity Enhancements
PFDepth的所有功能嵌入PFTrack
Extended Digital Cinematography Camera Support
扩展数字摄影摄像机支持
Advanced Photogrammetry Texture Extraction Tools
高级摄影测量纹理提取工具
Experimental RGBD Pipeline for Depth Sensors
深度传感器的实验RGBD管道
Additional Improvements and Features
其他改进和功能
All functionality of PFDepth embedded in PFTrack
All PFDepth nodes are now fully integrated and available in PFTrack
Many more ways to create and manipulate depth maps:
Updated Z-Depth Solver node
Z-Depth Tracker, Merge, Edit, Filter, Composite and Cache nodes
Z-Depth Object node
Rotoscope-based depth editing
Ideal tool to prepare clips for z-based compositing
Extended stereo camera and image pipeline:
Build Stereo Camera node to automatically position the right-eye camera after tracking the left-eye
Stereo Disparity Solver, Disparity Adjust and Disparity-to-Depth conversion nodes
Fix common issues such as stereo keystone alignment and left/right-eye colour and focus mismatches
Render left and right-eye images from a single clip using Z-Depth data
PFDepth的所有功能嵌入PFTrack所有PFDepth节点现在都完全集成在PFTrack中更多的方法来创建和操纵深度图:
更新了Z-Depth Solver节点
Z深度跟踪器,合并,编辑,过滤器,复合和缓存节点
Z深度对象节点
基于Rotoscope的深度编辑
为基于z的合成准备剪辑的理想工具
扩展立体相机和图像管道:
建立立体声相机节点,在跟踪左眼后自动定位右眼相机
立体声视差求解器,视差调整和差距到深度转换节点
解决常见的问题,如立体声梯形失真校准和左/右眼的颜色和焦点不匹配
使用Z-Depth数据从单个剪辑渲染左眼和右眼图像User Interface Updates and Productivity Enhancements
Node creation panel has been updated with nodes organised into groups to make them easier to find
New Custom node group, where commonly used nodes can be placed for quick access
Tree layouts can be saved as XML preset files to help quickly construct common sets of nodes
Tree preset XML files can be copied onto other machines or given to users to share common layouts用户界面更新和生产力增强节点创建面板已经被组织成组的节点进行了更新
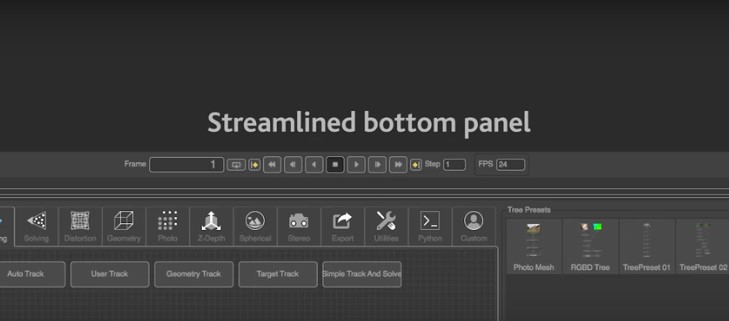
使其更容易找到
新建自定义节点组,其中可以放置常用节点以进行快速访问
树布局可以保存为XML预设文件,以帮助快速构建常见的节点集
树预设的XML文件可以复制到其他机器上或给予用户共享通用布局Extended Digital Cinematography Camera Support
Added support for reading ARRI RAW media files
Camera and lens metadata is automatically read from RED and ARRI source files
ARRI metadata can also be read from DPX, OpenEXR or Quicktime ProRes files
Added support for importing custom XML metadata to the Clip Input node
All metadata is passed through the tree and can be accessed by python or export nodes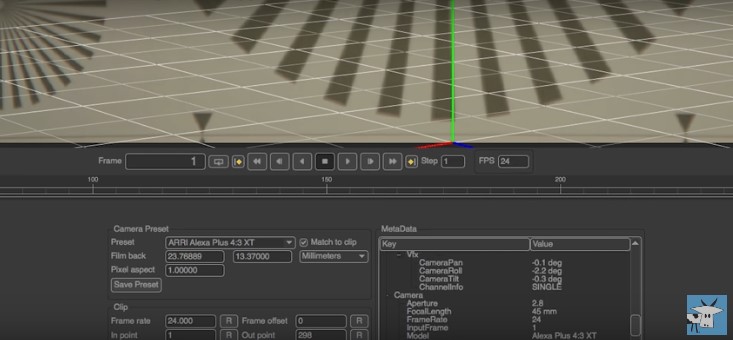
扩展数字摄影摄像机支持增加了阅读ARRI RAW媒体文件的支持
从RED和ARRI源文件自动读取相机和镜头元数据
也可以从DPX,OpenEXR或Quicktime ProRes文件读取ARRI元数据
增加了将自定义XML元数据导入到Clip Input节点的支持
所有元数据都通过树传递,可以通过python或export节点访问Advanced Photogrammetry Texture Extraction Tools
An optimized texture map can now be created automatically in the Photo Mesh node as part of the simplification process
Exposure and brightness differences in the source media can be automatically corrected to provide the best quality texture map
Exposure balanced images are automatically passed down-stream, and can be used in the Texture Extraction node for manual texture painting if required
Normal, displacement and occlusion maps can also be generated during simplification, to ensure the simplified mesh retains as much visual fidelity as possible
Normal maps support both world and Mikk tangent spaces
Occlusion maps can be generated for either the sky or local surface occlusion
Additional texture maps are exported automatically by the Export node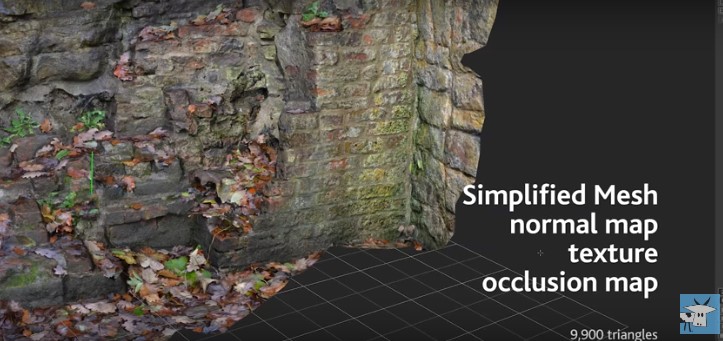
高级摄影测量纹理提取工具作为简化过程的一部分
现在可以在Photo Mesh节点中自动创建优化的纹理贴图
源媒体中的曝光和亮度差异可以自动更正,以提供最优质的纹理贴图
曝光平衡图像自动传递到下游,如果需要,可以在纹理提取节点中使用手动纹理绘画
在简化过程中也可以生成正常,位移和遮挡图,以确保简化的网格尽可能保留视觉保真度
正常地图支持世界和Mikk切线空间
遮挡图可以产生天空或局部表面遮挡
其他纹理贴图由导出节点自动导出Experimental RGBD Pipeline for Depth Sensors
Z-Depth data captured by external sensors can be attached to an RGB clip and passed down the tracking tree
Auto Track and User Track nodes updated to read z-depth values for trackers at each frame
Camera Solver node will use tracker z-depth values to help solve for camera motion
Can reduce drift in long shots
Can improve accuracy when tracking complicated camera movements
Provides 3D data for nodal pans
Provides a real-world scale without any additional steps
Z-Depth Mesh node can be used to convert depth maps into a coloured triangular mesh
An iOS application will be released during 2017 allowing depth data to be recorded using an iPad and the Occipital Structure Sensor capture devic
深度传感器的实验RGBD管道
Z-由外部传感器捕获的深度数据可以附加到RGB剪辑并沿着跟踪树传递
自动跟踪和用户轨迹节点被更新,以便在每个帧处读取跟踪器的z深度值
相机解算器节点将使用跟踪器z深度值来帮助解决相机运动
可以减少长时间的漂移
跟踪复杂的摄像机运动时可以提高精度
为节点平台提供3D数据
提供真实世界的规模,无需任何其他步骤
Z深度网格节点可用于将深度图转换为彩色三角形网格
iOS应用程序将在2017年发布,允许使用iPad和枕头结构传感器捕获设备记录深度数据Additional Improvements and Features
Documentation updates and improvements
Added camera presets for ARRI ALEXA and RED cameras
Improved initial keyframe selection algorithm in Camera Solver node
Improved Auto Track feature tracking when using undistorted image plates containing blank edge areas
Custom XML metadata import can be used to define per-frame lens distortion, focal length and camera pose values
Cooke /i Data file import has been moved from the Edit Camera node into the Clip Input node
Added support for importing .PTS and FARO .XYB LIDAR files in the Survey Solver node
Improved pivot-point handling in the Survey Solver node when LIDAR datasets contain stray points far from the scene
Added an XML export python script to store camera data using the same custom XML schema as supported by the Clip Input node
Added depth-test and back-face culling options to the Geometry Track node to help painting vertex weights and deformable groups on complex geometric models
Added a focal length reset button to Camera Solver and Survey Solver nodes that can be used to reset the solved focal length to incoming value if it has been set by another node up stream
Added exposure and image processing controls to the Clip Input node for control of ARRI RAW and OpenEXR decoding
其他改进和功能
文档更新和改进
为ARRI ALEXA和RED相机增加了相机预设
Camera Solver节点中改进的初始关键帧选择算法
使用包含空白边缘区域的未失真图像板时,改进了自动跟踪功能跟踪功能
自定义XML元数据导入可用于定义每帧镜头失真,焦距和相机姿态值
Cooke / i数据文件导入已从编辑相机节点移动到剪辑输入节点
增加了在Survey Solver节点中导入.PTS和FARO .XYB LIDAR文件的支持
当LIDAR数据集包含远离场景的杂散点时,调查解算器节点中改进了枢轴点处理
添加了一个XML导出python脚本来使用Clip Input节点支持的相同的自定义XML模式来存储相机数据
向几何轨迹节点添加了深度测试和背景剔除选项,以帮助在复杂几何模型上绘制顶点权重和可变形组
向摄像机解算器和调查解算器节点添加了焦距重置按钮,如果已经由另一个节点上传流设置了可用于将求解的焦距重置为传入值
为剪辑输入节点添加曝光和图像处理控制,以控制ARRI RAW和OpenEXR解码
- 作者帖子
- 在下方一键注册,登录后就可以回复啦。