【3DEqualizer教程】使用网格校正镜头对焦过程畸变(视频详解)
› VFX大学 › PFtrack,3DEqualizer,Mocha追踪 › 【3DEqualizer教程】使用网格校正镜头对焦过程畸变(视频详解)
标签: 3DEqualizer
-
作者帖子
-
-
2019-09-01 - 22:07 #67629
大家好,我是追光,之前讲过使用网格校正定焦镜头的畸变方法,今天我们在定焦镜头的基础上继续深入:定焦镜头在焦点变化过程中产生的畸变如何校正?
原始定焦焦头每个步长拍摄的棋盘格:
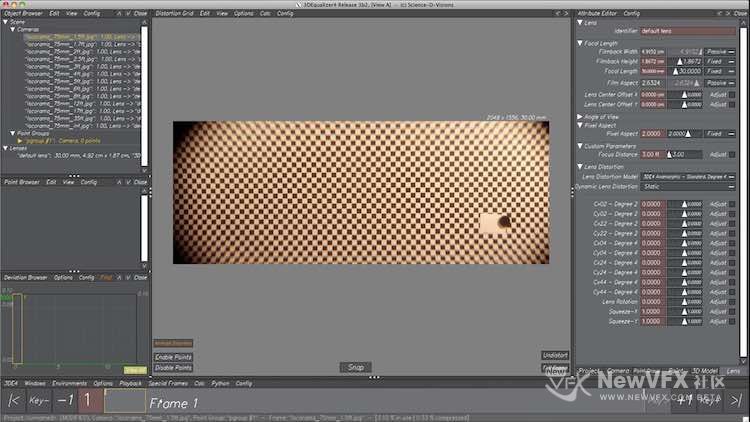
对定焦镜头每个步长进行畸变校正之后:
摄像机📹反求分为两个核心部分:
1、摄像机镜头反求。目的是精确计算出前期拍摄摄影机的各种参数,并在后期软件中近乎于百分百的使用三维软件创建一支与前期完全一致的摄影机,反求出的摄影机有着与前期真实摄影机同样的感光元件,相同光学折射的物理镜头,以及同样的畸变性能。
2、反求出摄像机运动轨迹。
什么是对焦与变焦以及对焦步长?
或许对焦焦点变化产生的畸变微乎其微,但在影视级的作品中,依然是不允许出现的误差。这就是为什么电影拍摄中,使用定焦镜头的原因,定焦镜头产生的畸变是相对固定的,针对一只镜头我们基本只需要解算一次即可长期使用。
对焦焦距变化与变焦镜头焦段变化两个概念比较容易混淆:
通常,对焦(调焦)分为focus near和focus near,是成像焦点距离的变化,也就是取景框中哪个距离的物体是清晰的,而不在对焦点上的会产生模糊;然而变焦分为zoom out 和zoom in,是镜头焦段的变化比如从50mm镜头变为70mm镜头。
现在的镜头中,内部结构非常复杂且极其精密,对焦点的变化是由高精度的步进电机驱动的,步进电机驱动的最小单位是步长,电机每次通电驱动镜头移动的最小幅度受步长控制。每次对焦镜片往前或往后移动一毫米甚至更少,也会与上一次位置的畸变不一致。 今天我们使用3dequalizer来解算定焦镜头对焦点发生变化而产生的畸变。
我们今天解算一只定焦镜头在各个步长上产生的畸变来作为案例进行学习。
接下来的流程是: 1. 拍摄棋盘格;2. 将多个焦段棋盘格图片导入到3de作为参考帧,并正确设置摄影机参数;3. 对每个棋盘格创建一个网格,并正确对齐网格矩阵;4. 分别解算镜头畸变,并创建关键帧;4. 测试畸变结果。5. 导出镜头畸变参数存储。 6. 将镜头畸变参数应用到此镜头拍摄的影片中。(应用这部分内容比较多,所以我们会新开一个帖子)
第一步、使用镜头的各个步长(对焦点)拍摄棋盘格。
在本实例中我们使用一支75mm的宽银幕变形镜头分别使用对焦点拍摄:1.5ft,1.7ft,2ft,2.5ft,3ft,4ft,5ft,6ft,8ft,12ft,17ft,35ft,70ft,共计13张图片。
练习素材下载:
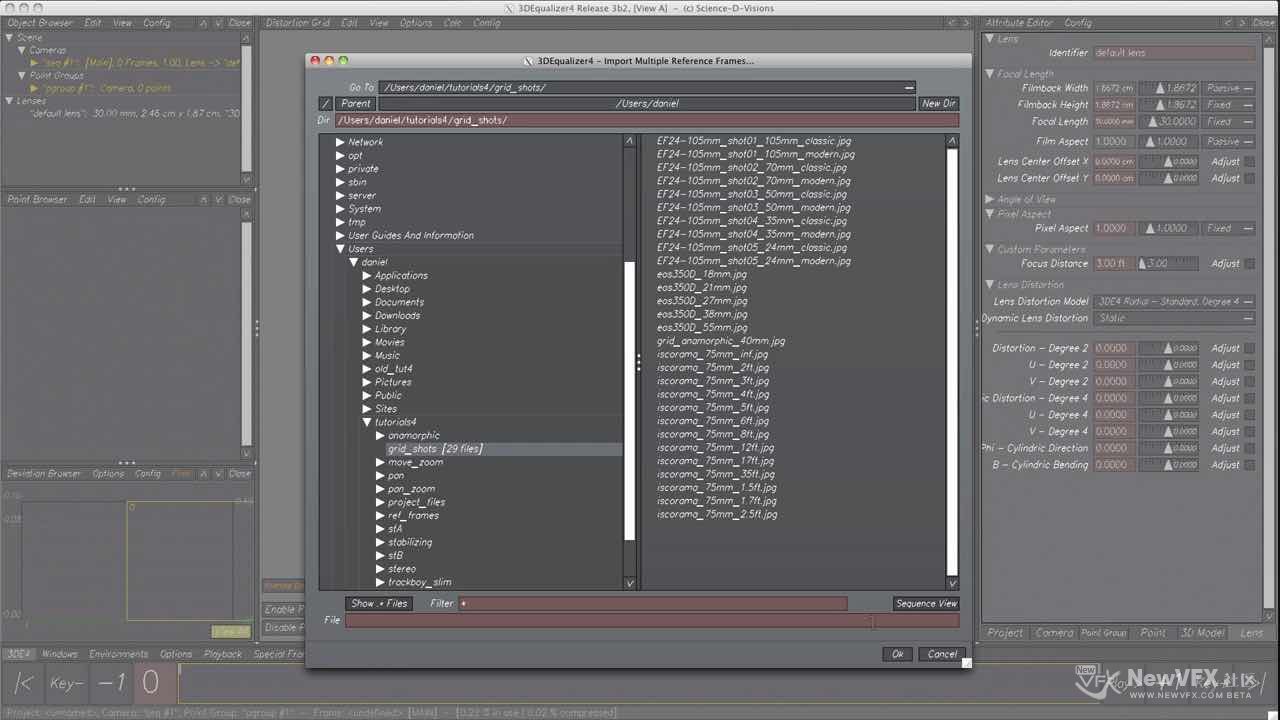
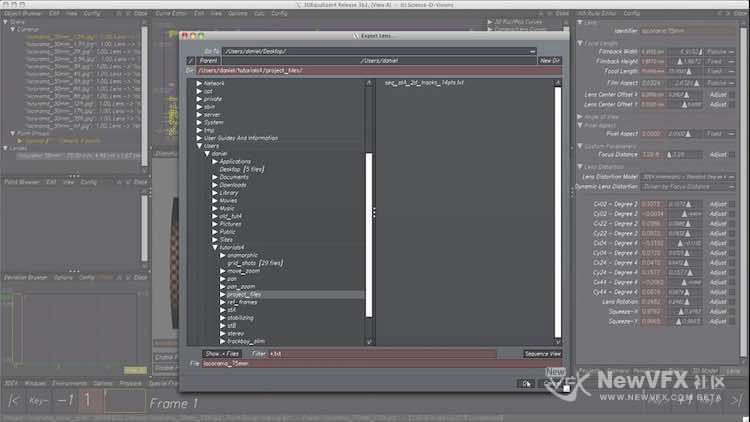
第二步、导入多个参考摄影机。
点击底部菜单 3DE > File > Import > Import Multiple Reference Frames…,导入多个参考帧。打开文件浏览器之后,可以看到所有的参考帧的名称前缀都一样,所以我们
1使用表达式 iscoramat* 导入文件点击后会发现,3de左上角创建了多个参考帧摄影机,可以将工程自带的Main(主)摄影机删掉,然后点击拖拉可以对参考帧摄影机进行重新排序。(这里我们按照对焦步长进行排序,方便输入参数)
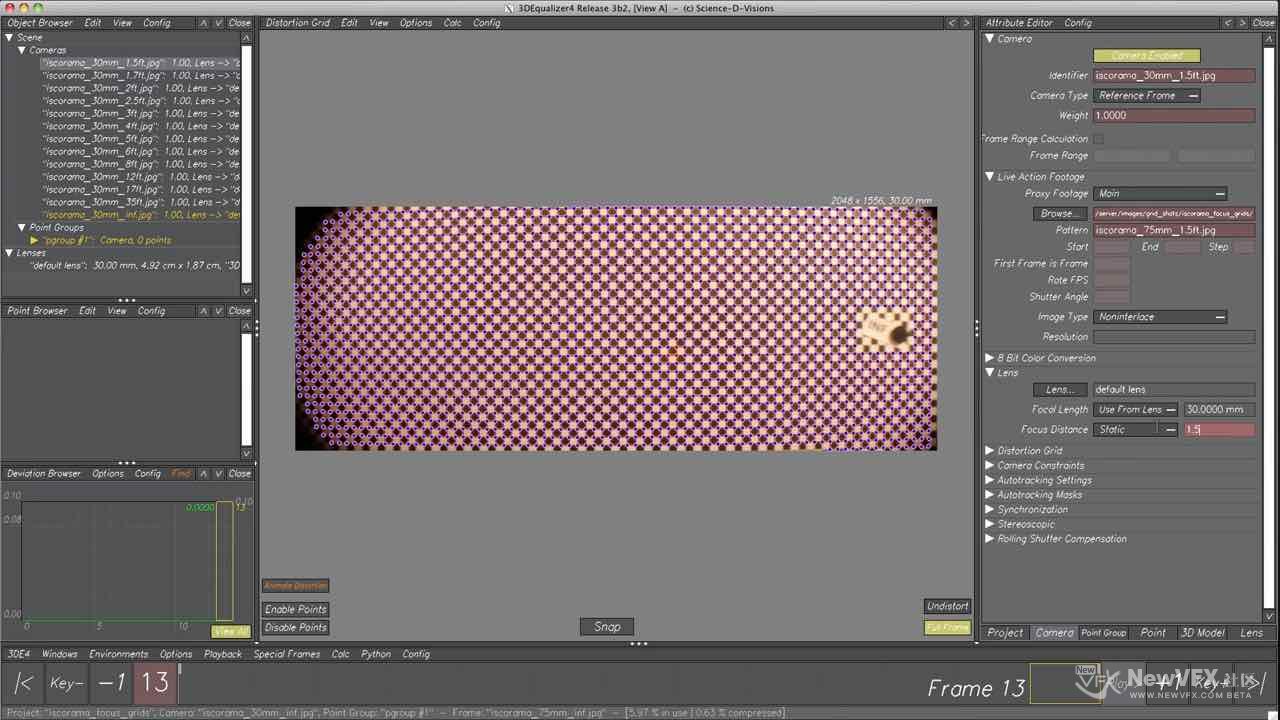
第三步、设置追踪软件(3DEqualizer)中的Camera(相机)与Lens(镜头)
分别为每个Ref Camera(参考摄影机)设置为拍摄时候所对应的FT(步长),并设置摄影机参数 Foculens:75mm,因为是变形镜头 Pixels Aspect:2,lens Center Offset:0.26cm。
第四步、添加矩阵网格
切换工作环境到Distortion Grid (镜头畸变)面板,对每个ref(参考摄影机)添加Matrix网格。
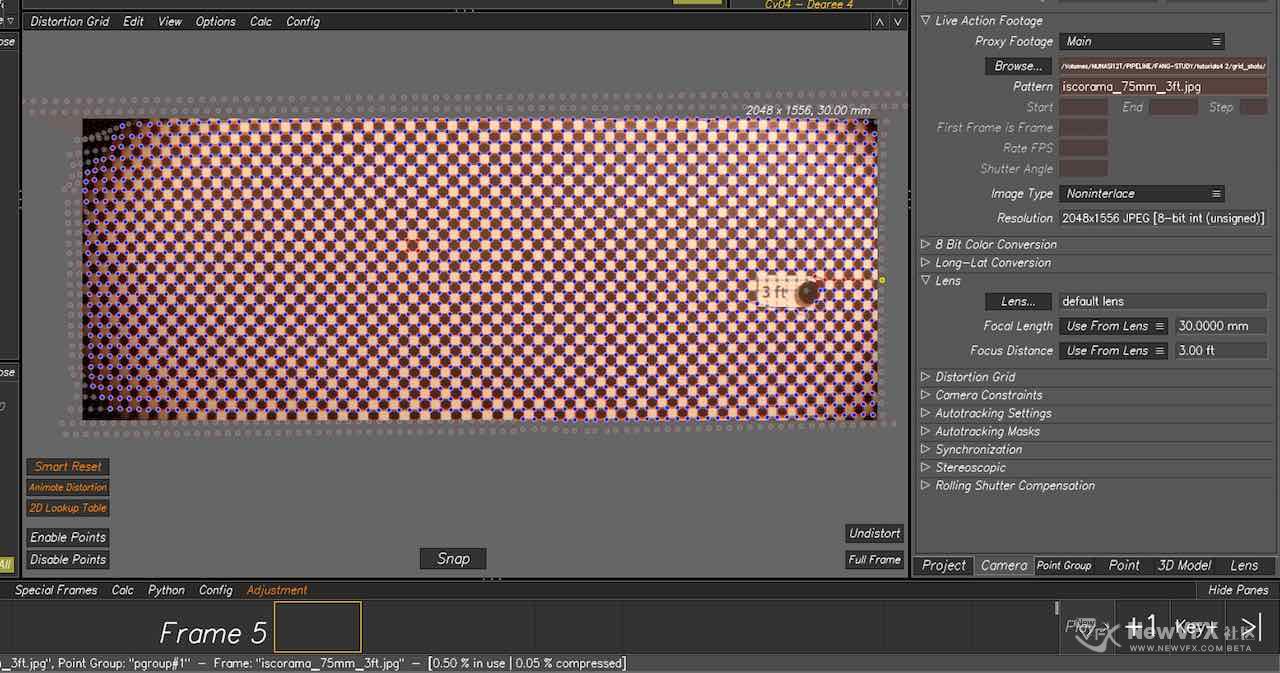
追光提示:在扩展矩阵网格时候,遇到阻挡时,在 Options—> Automaticly Snap Add Points (关闭自动吸附),然后继续添加矩阵,等到覆盖阻挡物时,框选阻挡物体上的点,按快捷键D,禁用这些点。然后再开启自动吸附,继续添加矩阵网格。
小技巧:如果有点抖聚集到一个点上,可以选择这个点,然后点击 菜单—Edit–>> Set Matrix Point Status to —->Release(打散点),然后点击Snap即可散开。
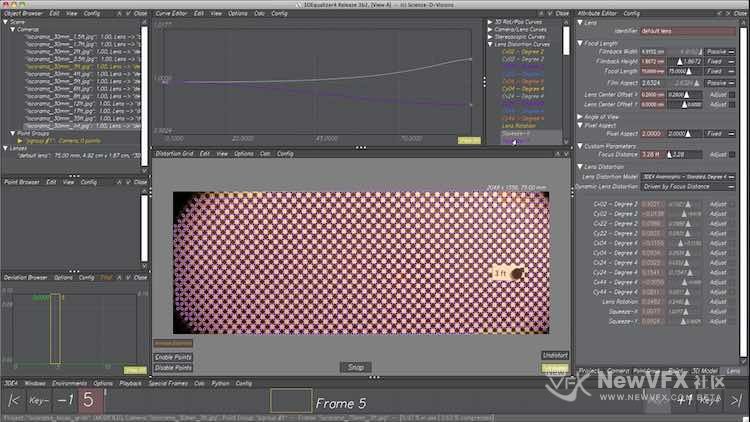
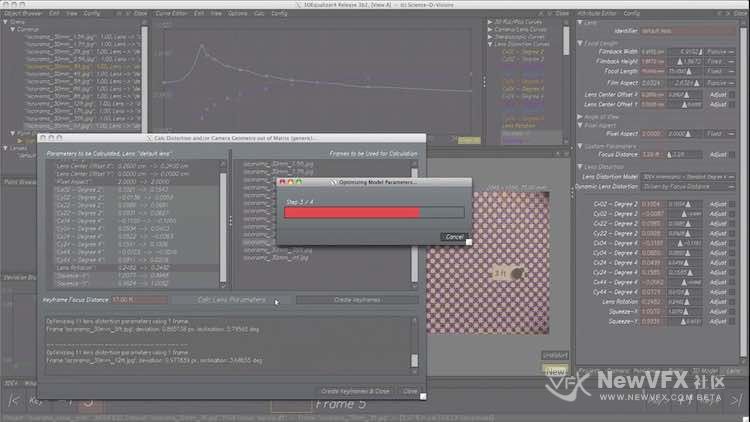
第五步、全选Ref并点击Calcu(开始解算),每个Ref 都分别解算。
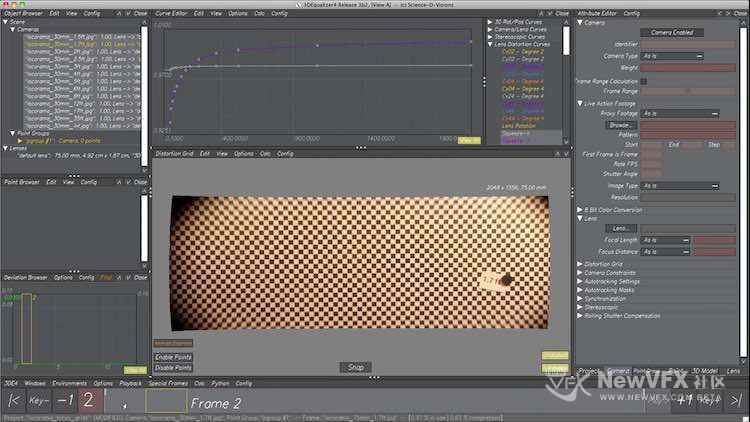
这里我们可以同时打开Curve Editor用于观察解算结果(选中Lens Distortion里的Squeeze X, Squeeze Y)
提示:镜头模型选择: 3DE4 Anamorphic degree 4,Dynamic Distortion选择:Driver By Focus lens Only。
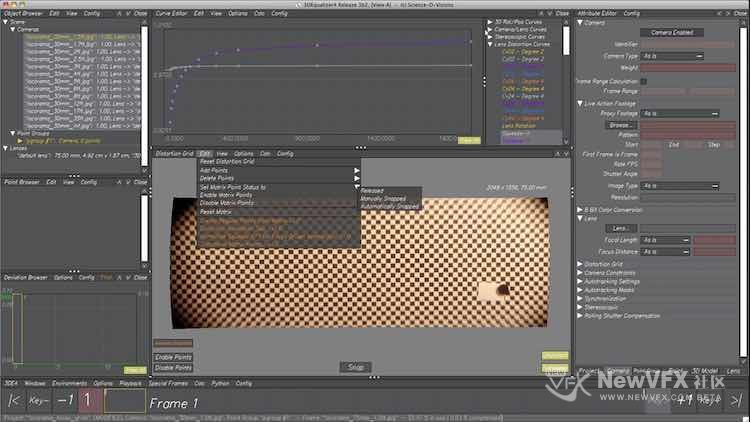
第六步、对解算的曲线进行平滑优化处理
检查曲线上的每个关键帧,发现其实很不平滑。所以在曲线面板上,选中所有的关键帧点,点击 Edit > Smooth Tangents,平滑所有点上的曲线。还有不平滑的,手动调节一下。
第六步、将Squeeze X,Squeeze Y的数据转换为 镜头变焦畸变数据。
全选所有Ref,在 Editor—>> Normalize Squeeze X/Squeeze Y For Focus Driven Anamorphic
第七步、测试畸变结果并导出存储
解算完成后,取消网格显示,点击画面下方的 Undistort,启用去畸变功能,此时我们看到的画面就是校正过畸变的画面了。
我们对镜头重命名一下,然后点击镜头右键—>> Export 导出到磁盘,以备使用。
追光提示:导出后建议重新导入测试一下,以防止数据有问题。
下一节,我们将带大家来使用这些镜头数据到此镜头拍摄的实际影片中。
好啦,今天的教程就到这里了,如有疑问,可以跟帖留言,追光会尽快回复噢。
如果喜欢追光的帖子,点击我的头像,加我为好友,就可以看到我得更新啦,也可给我发私信,点击帖子顶部得收藏放入收藏夹,方便将来再次查看~
本帖未经允许不得转载,禁止二次转载,转载请注明出处并保留在本站的完整链接,谢谢!
-
-
作者帖子
- 在下方一键注册,登录后就可以回复啦。
