【PFTrack教程】如何使用Photogrammetry摄影测量(图文详解)
› VFX大学 › PFtrack,3DEqualizer,Mocha追踪 › 【PFTrack教程】如何使用Photogrammetry摄影测量(图文详解)
标签: PFtrack, Photogrammetry, 摄影测量
-
作者帖子
-
-
2018-01-03 - 09:32 #30435
V友们上午吼🐒哇,本帖将带大家使用 PFTrack 的摄影测量工具组,解算教程中的片段,然后在场景中添加第二个摄像机。主要工作原理是从一组静帧中创建点云,然后自动将摄像机解算到点云定义的场景中。
文末会放上练习素材下载链接,大家不要心焦。
如果想自己拍摄摄影测量素材,可以学习这篇视频教程:
当然社区内也提供了使用Nuke做场景测量的方法:
-
2018-01-03 - 09:44 #30436
1. 导入静帧图像
在项目中打开文件浏览器,定位到静帧图像,在缩略图上双击可以预览。这12张照片不是电影摄影机拍摄的,是电影拍摄前的场景照片,用来做摄影测量的。
再次双击可以返回文件浏览器。
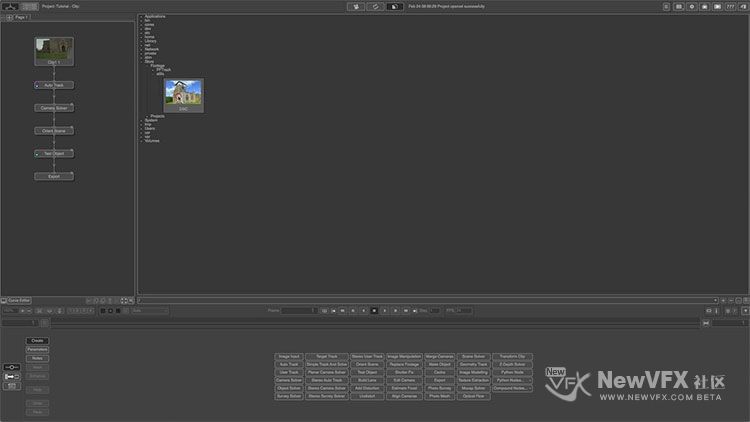
默认情况下,如果一组图像的命名遵循一定的命名规则(如同一个名字,只是后缀编号不一样),PFtrak 会自动将其并为一个图像序列;但是这次我们要处理的就是图片,而不是视频片段,所以要点击文件浏览器右下角的 G 按钮,改变默认设置。
这样 PFTrack 将显示12张独立的照片,而不是一个图片组。打开媒体 Bins,将整个静帧文件夹拖入媒体 Bins 左边的列中,将整个文件夹导入项目。

完成后点击 F 按钮,重新启用文件浏览器默认的组图像文件功能。
-
2018-01-03 - 10:11 #30448
2. Image Input 节点(图像输入节点)
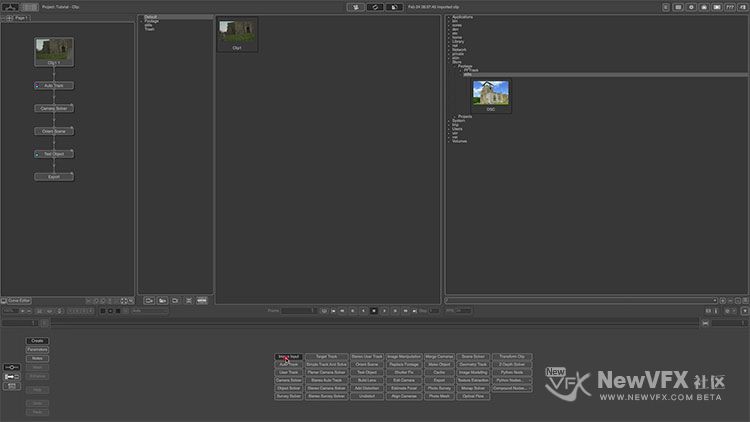
Image Input 节点是 PFTrack 使用静帧进行摄影测量的首选方法。点击 Create > Image Input,创建此节点。

再次打开媒体 Bins,选择所有的静帧,拖进 Image Input 节点的图片列表中。
现在我们可以使用常用的导航按钮或直接选择列表中的图像,浏览这些图像。
白色箭头表示图像的方向,我们可以使用这些按钮调整图像的方向。还有一些选项可以旋转或翻转图像。
-
2018-01-03 - 10:28 #30450
3. Photo Survey(图片测量)
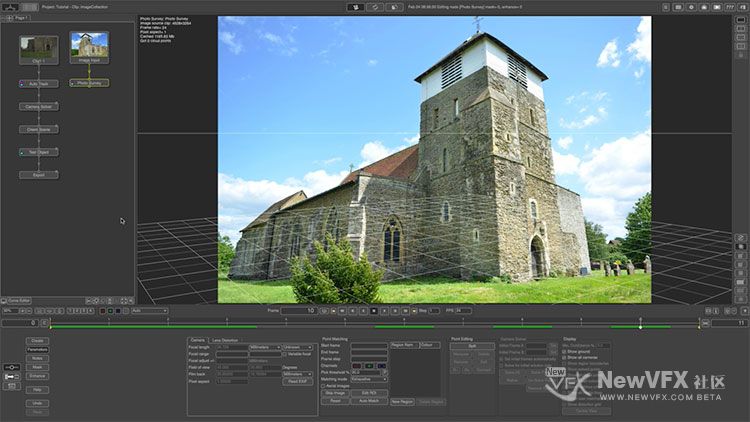
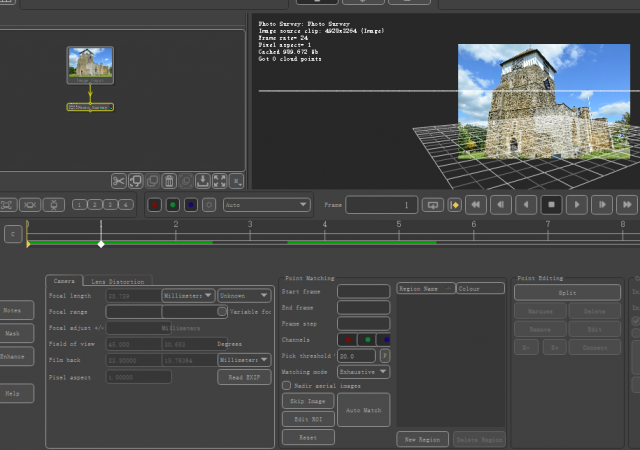
现在我们要使用 Photo Survey 节点从静帧中生成测量数据点云。右键 Image Input 节点,从菜单中选择 Photo Survey。

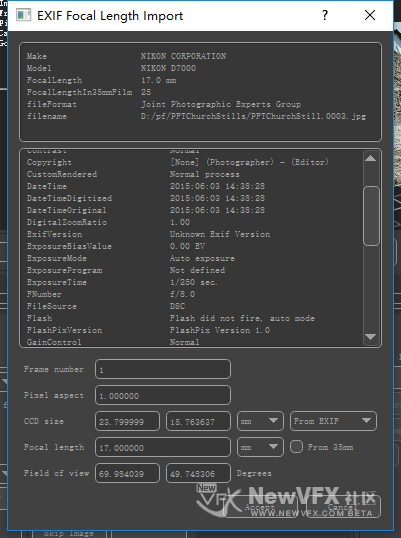
点击 Read EXIF,从图像文件中读取 EXIF 数据。预览 EXIF 数据,然后点击 Accept。此时会弹出一个对话框,询问是否允许稍微偏离报告的焦距,注释也说得很清楚,这样可以提高解算精度,所以点击 Yes 确认。
Feature Matching 特征点匹配
接下来是本帖最关键的操作。
点击 Auto Match 开始生成数据。
在生成测量数据的过程中,PFTrack 会浏览所有的图像,以识别多个图像中共有的特征点。在匹配过程中,识别的特征点会在 Cinema 以黄色十字架出现。

数据生成后,我们可以检查匹配点,在 Cinema 中选择一个特征点,播放条上的标记会识别包含该特征点的其他图像。

我们可以跳到这些图像上查看匹配。

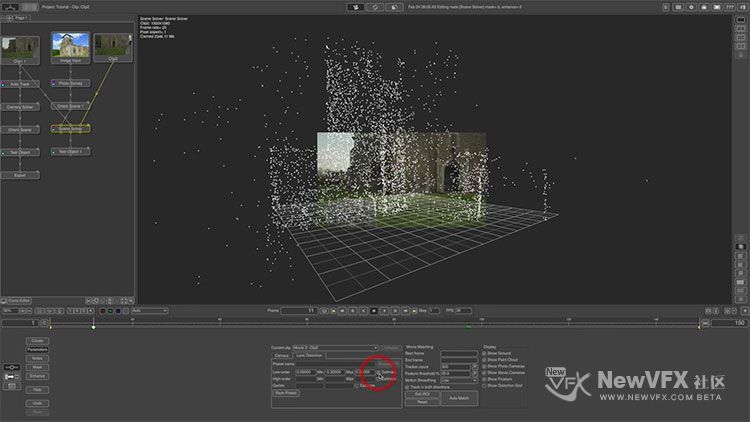
接下来我们将这些特征点匹配转换为3D数据,此时需要我们启用自动估计镜头畸变,得到更精确的摄像机位置估算和3D点云。
在 Lens Distortion 选项卡上,将 Low-order 和 High-order 镜头畸变的 Estimate 都激活。
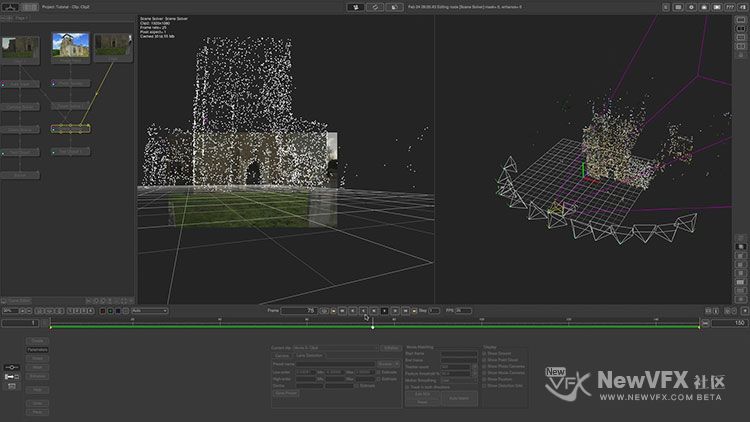
然后选择 Solve All,生成点云,并计算每个图像的摄像机位置。
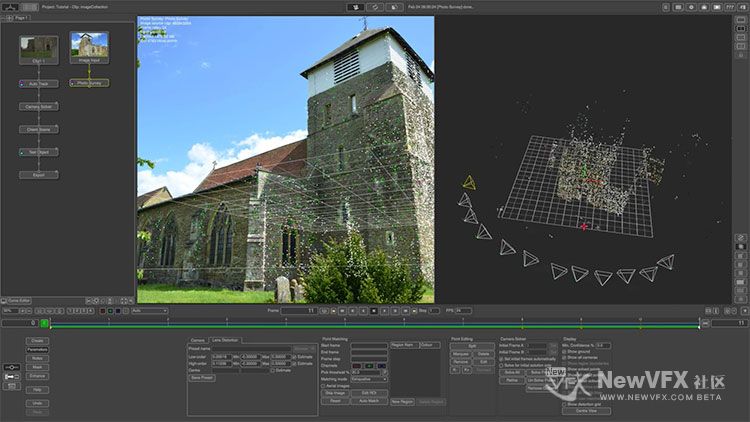
完成后,我们会得到一个3D场景,在透视视窗中可以查看。在点云中很容易看出教堂的形状,我们可以可以看到拍摄照片的位置。
-
2020-05-24 - 22:43 #71781
请问第三部的常规解算步骤是必须的吗?
感觉右边的教学步骤跟左边的反求步骤之后那几步都没有关联-
2020-05-25 - 12:05 #71785
摄影测量的核心就是第三步,做高精度的反求的基础。不管是哪个软件、哪种精确反求,都基于此,是高端制作中必不可少的拍摄环节、也是必不可少的测量环节。如果对反求结果要求不高,是可以省略这一步。
这一步是后续步骤反求的核心,除非只想要摄影机运动轨迹,而不需要物体在三维场景中有精确的三维点云位置,就跳过这一步。
第三步的操作是为后期在Maya、houdini中精确建模、做动画、或者动力学模拟提供坐标参照数据的。
制作电影、游戏、高级广告的基本流程,但整体制作流程、复杂度、成本都非常的高。
在学习这个流程前、建议熟练一种三维软件(C4d、Maya、Houdini),不然很难理解这一组数据的应用目的,摄影测量本质是为后期的三维软件服务的。
-
-
-
2018-01-03 - 10:36 #30451
4. 定位场景
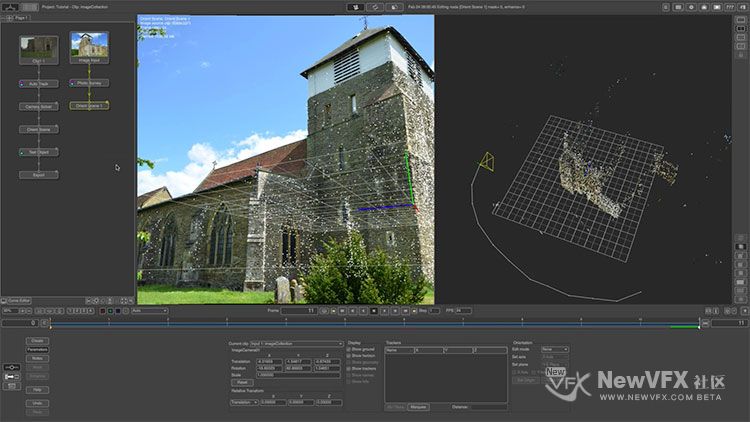
现在我们使用 Orient Scene 节点定位场景。右键 Photo Survey 节点,然后选择 Orient Scene,将原点设置在教堂⛪️的左下角。
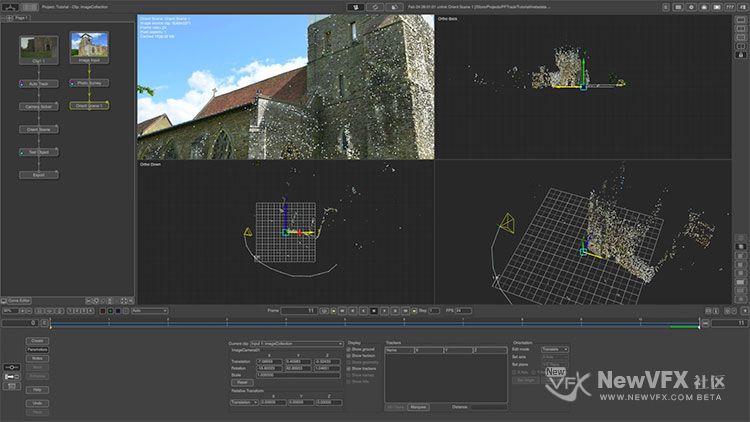
将视窗分为4个窗口,以便多视角查看场景。在 Edit mode 菜单中选择 Translate,然后将原点移到我们想要的位置。要注意,右上角的视窗显示的是场景的后视图,所以左下角是该视图的右侧。
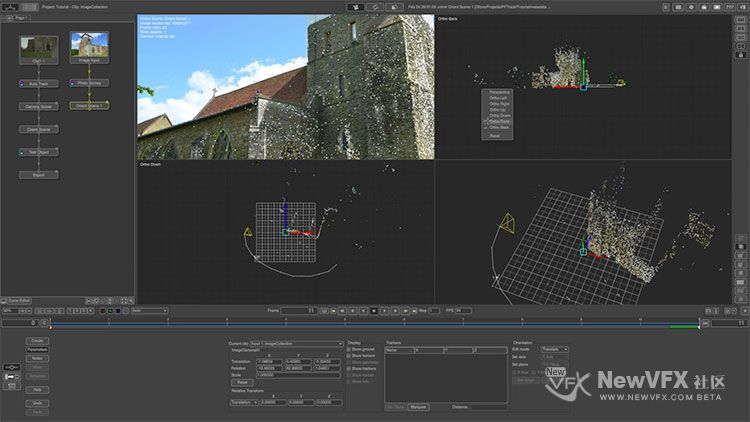
我们可以按住 Command/Control 键同时右键窗口,改变窗口的视角。比如选择 Ortho Front 作为新的视角。
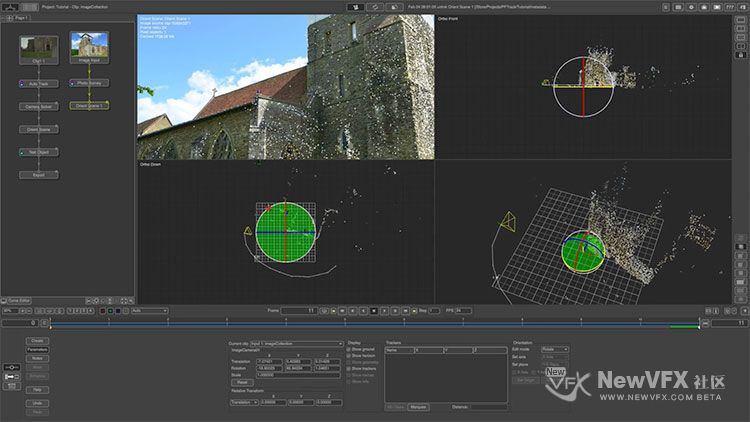
然后在 Edit mode 下选择 Rotate,旋转坐标系统,将教堂的墙与坐标轴对齐。完成后,将 Edit mode 切换为 None,隐藏操控器,并将视窗切换为单个窗口。
-
2018-01-03 - 10:49 #30452
5. 解算移动摄像机

接下来我们使用 Scene solver 节点跟踪移动摄像机,并解算到创建的场景中。选择 Orient Scene 节点,然后右键选择 Scene Solver。
测量照片和点云应该连接到节点的第一个输入上。在将移动片段跟踪到场景中时,我们需要点击 Initialize 初始化点云数据。
此操作每个 Scene Solver 节点只能做一次,完成后,此祭奠可以用于跟踪和解算几乎无限数量的摄像机到场景中。

然后将视频片段连接到第二个输入端。
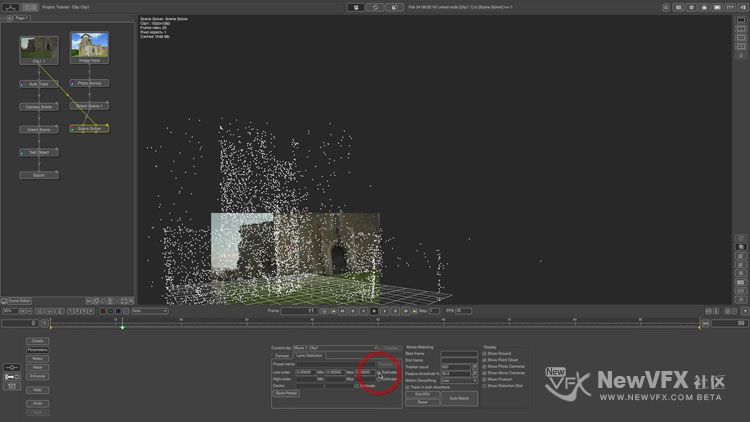
并在 Current clip 菜单中选择 PFTChurch1。
和之前生成点云的时候一样,开启镜头畸变估计。在 Lens Distortion 选项卡上,为 Low-order 镜头畸变勾选 Estimate。
然后点击 Auto Match。
此时 PFTrack 开始跟踪贯穿整个镜头的特征点,和 Auto Track 节点一样,勾选 Track in both directions 以增加平均特征长度。完成跟踪后,PFTrack 会自动进行下一步处理——解算摄像机运动,并将运动的摄像机对齐到场景中。
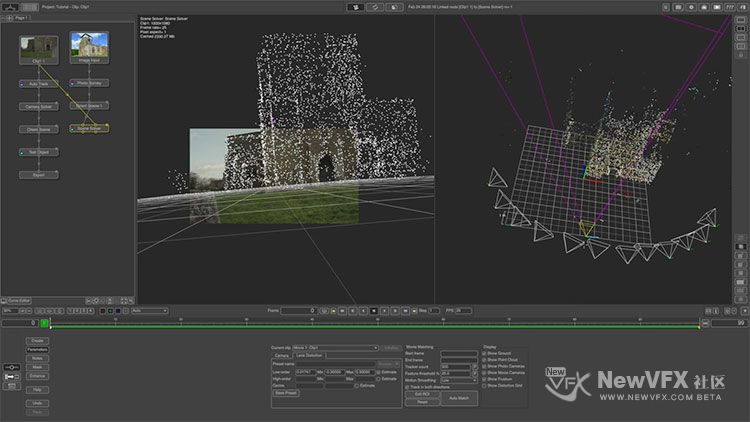
这一步完成后,我们可以在透视视窗中查看解算结果,这时我们会看到运动摄像机已经和静止摄像机和点云一起嵌入到场景中。
-
2018-01-03 - 10:54 #30455
6. 测试解算结果
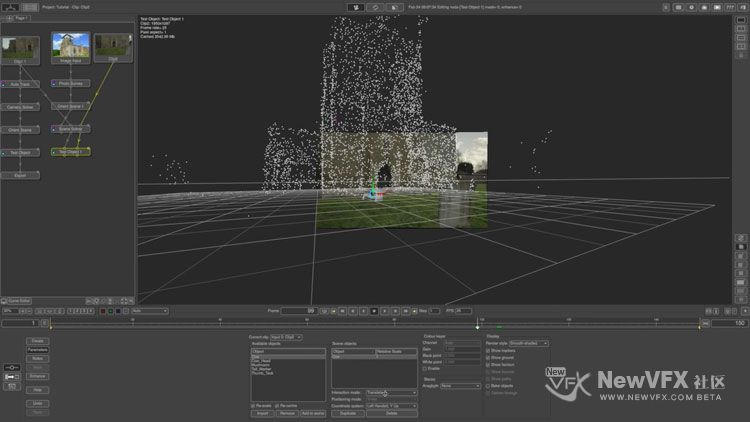
接下来我们测试下解算结果是否准确。首先创建 Test Object 节点,此节点会自动连接到 Scene Solver 的第一个输出上,但是此输出包含的是静帧和点云数据,所以我们需要将其连接到第二个输入端(包含视频片段),然后双击 Test Object 节点,激活它。
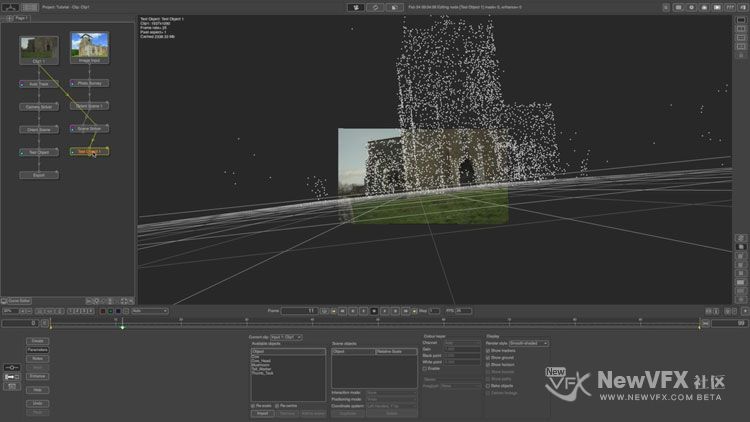
在 Test Object 节点上,添加一个 cow(奶牛)到场景中,然后来回播放,可以看到奶牛钉在同一个位置上,并没有偏移。

-
2018-01-03 - 11:09 #30456
7. 添加第二个片段
接下来我们再添加一个片段到场景中。打开文件浏览器,并定位到第二个教程片段,拖拽其缩略图到节点树窗口中。
记住,右键和中键可以平移和缩放节点树窗口。将导入的片段连接到 Scene solver 节点上。
在 Scene Solver 节点中,重复步骤5中的解算操作:将 Current clip 菜单切换为 PFTChurch2,开启 low-order 镜头畸变的 Estimate,然后点击 Auto Match。
完成后,打开透视视角并播放整个片段,可以看到场景中有两个移动摄像机。
将 Scene solver 的第三个输出(包含第二个视频片段)连到 Test Object 节点上,这样这两个片段就能共享这个测试物体。

关闭 Show trackers、Show ground 和 Show horizon,并将片段缩放到适合的高度,此时奶牛应该待在它应该在的地方。
-
2018-01-03 - 11:18 #30460
8. 导出场景
现在我们准备倒出场景啦。选择 Scene Solver 节点,右键选择 Export,同时将 Test Object 节点的输出端也连接到 Export 上。

导出场景包含三个摄像机、测试物体以及点云。
下面附上教程的练习素材链接:
-
2018-01-03 - 11:23 #30461
这个sencesolver功能应该只有pftrack扫描的点云才能认,,要是外部扫描软件给到的模型也能直接跟踪匹配到序列帧镜头上就更好了
-
2018-01-05 - 16:19 #30704
点击Read EXIF后,Field of view 是红色的,怎么改大神 😯
-
2018-04-18 - 18:49 #35984
您好 ,请问我在结算摄像机的时候总是不成功报错是为什么呢?显示Failed to locate camera
-
2018-09-14 - 16:36 #49015
为什么我的里面没有sense solver啊?
-
2018-09-15 - 09:07 #49017
版本过低,要更新到2017版本才可以。
-
-
2018-10-02 - 23:44 #49084
请问一下 整个过程都已经明白 就是不太清楚什么时候需要用到这种方法呢
-
2018-12-16 - 20:29 #52087
大神,如果在复杂的运动镜头中,这种解算方式对于解算运动摄像机有没有帮助呢,有个镜头总是解算出错,不知道这种方法有没有帮助,谢谢大神
-
2018-12-17 - 12:25 #53884
如果前期拍摄中,已经拍摄好了测量的素材,这个方法是非常有用的
-
2018-12-17 - 19:21 #53887
老大,一个手持的镜头从起幅快速摇向落幅,中间动态模糊了许多,这种镜头的处理流程是怎样的昂,谢谢谢谢!!
-
2020-05-24 - 22:45 #71782
第5步开始就不动了。没有自动解算按钮,也不知道该点击链接哪里。没有摄像机反求序列那个步骤呀。头尾都在搞12张测量图,怎样匹配到反求呢,这个教学看起来有点晕,卡住在这步了
-
2020-05-26 - 00:46 #71786
正在学习中
-
2022-09-12 - 02:16 #124824
大佬,这段素材最后是去过畸变的,那么怎么把去过畸变的图像给导出去呢,如果在maya中使用未去过畸变的序列,那素材就会跟解算完的相机不匹配吧,所以关于这方面您方便再出一份教程吗?谢谢
-
-
作者帖子
 就这样,,
就这样,,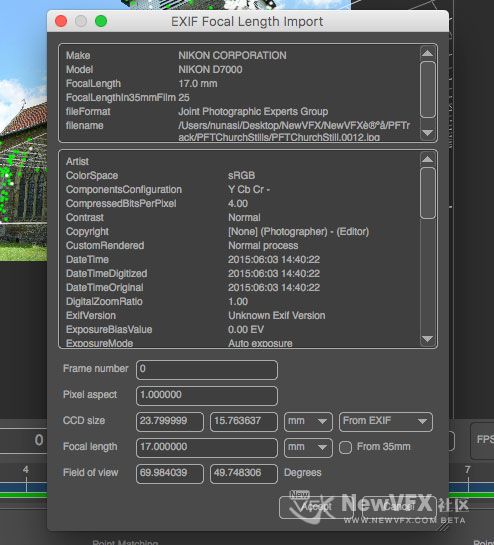
- 在下方一键注册,登录后就可以回复啦。
